DSO Installation and Testing
Operating environment
- Ubuntu 16.04
- ROS-kinetic
- Mono-steoro monocular camera
rely on
DSO dependencies are very few. Only a few libraries, such as Eigen3, pangolin and opencv, are familiar to everyone. The installation of DSO is described in detail on the author's github page. DSO Download and Install Link https://github.com/JakobEngel/dso Therefore, it is easier to install DSO:
1. Install eigen3
sudo apt-get install libsuitesparse-dev libeigen3-dev libboost-all-dev
2. Install openCV.
DSO relies very little on opencv and only reads or writes images and other simple operations.
sudo apt-get install libopencv-dev
3. Install pangolin.
According to Pangolin's github home page Installation tutorial
4. Install ziplib.
sudo apt-get install zlib1g-dev cd thirdparty #Find the file path where dso is located and switch to the thirdparty folder tar -zxvf libzip-1.1.1.tar.gz cd libzip-1.1.1/ ./configure make sudo make install sudo cp lib/zipconf.h /usr/local/include/zipconf.h
5. Install and compile DSO
First, you can wear a single dso workspace:
mkdir -p ~/catkin_dso/src cd catkin_dso/src catkin_init_workspace
Download the dso source code and compile it:
git clone https://github.com/JakobEngel/dso.git cd dso mkdir build cd build cmake .. make
Testing DSO
1. View dso_dataset
cd /dso/build/bin ls
If there is dso_dataset, then DSO compiles successfully.
2. Running DSO on TUM Monocular Data Set
Download the TUM dataset:
# 42GB TUM dataset for VO and SLAM scp stu8@47.111.6.8:/data/all_sequences.zip ./ # TUM datasets can also be used by downloading partial sequences [Official Links](https://vision.in.tum.de/data/datasets/mono-dataset?redirect=1) # Recommended Single Sequence Download
Unzip the downloaded package into the bin directory, then switch to the bin directory of DSO, and execute the program using the following commands.
cd /home/YOUR_PATH/dso/build/bin ./dso_dataset files=./sequence_12/images.zip calib=./sequence_12/camera.txt gamma=./sequence_12/pcalib.txt vignette=./sequence_12/vignette.png preset=0 mode=0
Files is the image compression package of data set, calib is the parameter file of camera, gamma and vignette are some characteristic parameters of camera, and photometric calibration file. Modes are switched for DSO mode, such as 0 for containing photometric expression files, 1 for containing only internal parameters, 2 for no distortion parameters. Preset is used to set the parameters of DSO operation, such as the number of selected pixels and so on. Preset=3 is a 5-fold speed DSO of preset=0.
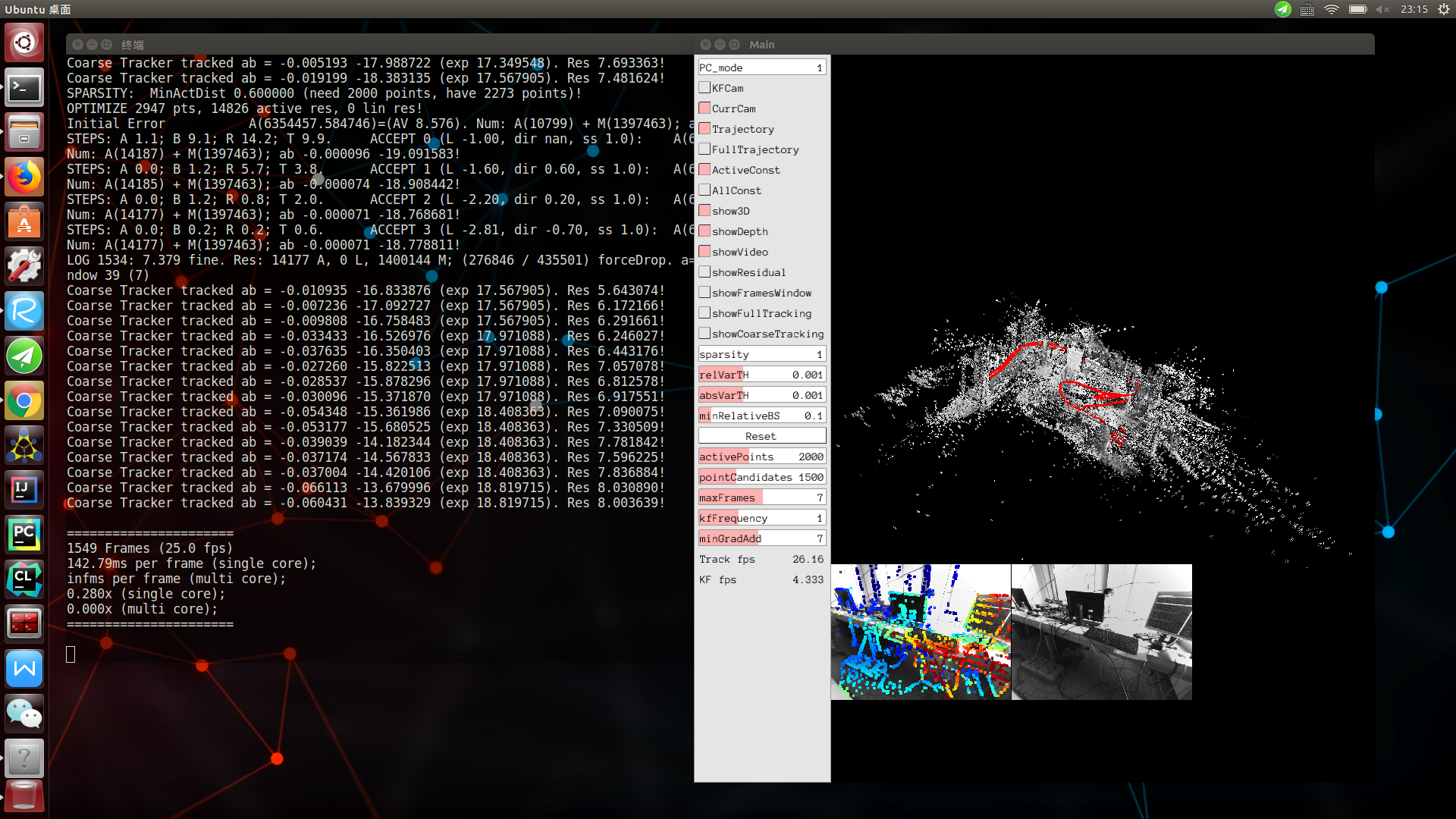
The results of data set operation are as follows:
Problems and Solutions
error 1:
When running. / dso_dataset file XXXXX
=============== PRESET Settings: =============== DEFAULT settings: - no real-time enforcing - 2000 active points - 5-7 active frames - 1-6 LM iteration each KF - original image resolution ============================================== PHOTOMETRIC MODE WITHOUT CALIBRATION! ERROR 9 reading archive /home/YOUR_PATH/dso/built/bin/sequence_12/images.zip!
Eror1 Solution
Because the decompressed version of sudo apt-get install zlib1g-dev installation has not been updated and may not be updated yet, manual decompression of images.zip in the TUM data sequence set is also modified in. / dso_dataset file XXXXXXX as follows:
./dso_dataset files=./sequence_12/images calib=./sequence_12/camera.txt gamma=./sequence_12/pcalib.txt vignette=./sequence_12/vignette.png preset=0 mode=0
All right.
error 2:
When running. / dso_dataset file XXXXX
Reading Calibration from file ... not found. Cannot operate without calibration, shutting down. Segment error (core dumped)
Eror2 Solution
Because the path in the instruction is written incorrectly, it can run after checking the path and correcting it.
To contact me
ROS Development Community ID: Yujian Jianghu;
email:anchuanxu@126.com;