Experimental task 1
Program task1.asm source code, and running screenshot
assume cs:code, ds:data
data segment
x db 1, 9, 3
len1 equ $ - x
y dw 1, 9, 3
len2 equ $ - y
data ends
code segment
start:
mov ax, data
mov ds, ax
mov si, offset x
mov cx, len1
mov ah, 2
s1:mov dl, [si]
or dl, 30h
int 21h
mov dl, ' '
int 21h
inc si
loop s1
mov ah, 2
mov dl, 0ah
int 21h
mov si, offset y
mov cx, len2/2
mov ah, 2
s2:mov dx, [si]
or dl, 30h
int 21h
mov dl, ' '
int 21h
add si, 2
loop s2
mov ah, 4ch
int 21h
code ends
end start
Q1 line27, when the assembly instruction loop s1 jumps, it jumps according to the displacement. Check the machine code through debug disassembly and analyze the jump displacement? (the displacement value is answered in decimal) from the perspective of the CPU, explain how to calculate the offset address of the instruction after the jump label s1.
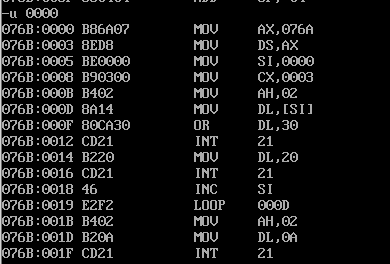
The displacement is 14. 001B-000D=000E=14.
The transfer instruction machine code is E2F2. F2=(11110010) complement = (10001110) original = - 14. After the CPU executes the transfer instruction, IP first + 2 and then minus 14.
Q2 line44. When the assembly instruction loop s2 jumps, it jumps according to the displacement. Check the machine code through debug disassembly and analyze the jump displacement? (the displacement value is answered in decimal) from the perspective of the CPU, explain how to calculate the offset address of the instruction after the jump label s2.
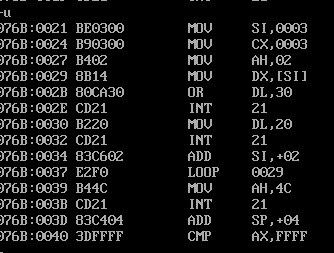
The displacement is 16. 0039-0029=0010=16
The transfer instruction machine code is E2F0. F2=(11110000) complement = (10010000) original = - 16. After the CPU executes the transfer instruction, IP first + 2 and then subtract 16.
Experimental task 2
Program task2.asm source code
assume cs:code, ds:data
data segment
dw 200h, 0h, 230h, 0h
data ends
stack segment
db 16 dup(0)
stack ends
code segment
start:
mov ax, data
mov ds, ax
mov word ptr ds:[0], offset s1
mov word ptr ds:[2], offset s2
mov ds:[4], cs
mov ax, stack
mov ss, ax
mov sp, 16
call word ptr ds:[0]
s1: pop ax
call dword ptr ds:[2]
s2: pop bx
pop cx
mov ah, 4ch
int 21h
code ends
end start
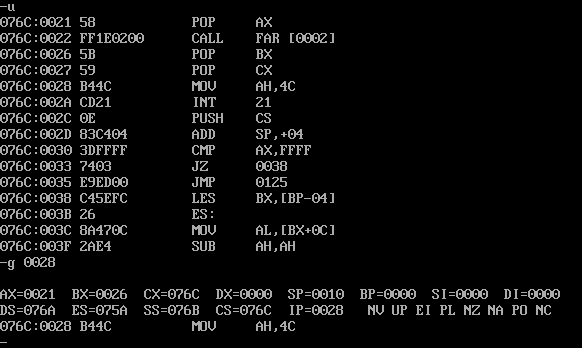
Q1 according to the jump principle of call instruction, it is analyzed theoretically that before the program executes to exit (line31), register (ax) = 0021 register (bx) = 0026 register (cx) = 076C
call first press ip or cs:ip on the stack, and then jump.
ax is the segment address of s1. cx:bx is the offset address of s2.
Q2 assemble and link the source program to get the executable program task2.exe. Use debug to observe and verify whether the debugging results are consistent with the theoretical analysis results.
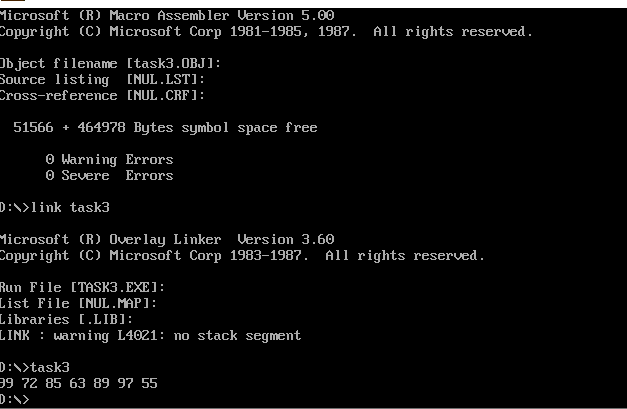
Experimental task 3
The program source code task3.asm is given
assume cs:code, ds:data
data segment
x db 99, 72, 85, 63, 89, 97, 55
len equ $- x
data ends
code segment
start:
mov ax, data
mov ds, ax
mov cx, len
mov byte ptr ds:[len], 10
mov si, 0
s:
mov al, ds:[si]
mov ah, 0
call printNumber
call printSpace
inc si
loop s
mov ah, 4ch
int 21h
printNumber:
div byte ptr ds:[len]
;AH:AL more than:Number quotient
mov bx, ax
mov dl, bl
add dl, 30h
mov ah, 2
int 21h
mov dl, bh
add dl, 30h
mov ah, 2
int 21h
ret
printSpace:
mov ah, 2
mov dl, ' '
int 21h
ret
code ends
end start
Screenshot of running test
Experimental task 4
The program source code task4.asm is given
assume ds:data, cs:code
data segment
str db 'try'
len equ $ - str
data ends
code segment
start:
mov ax,data
mov ds,ax
mov ax, 0b800h
mov es, ax
mov si, 0
mov di, 0
mov cx, len
mov bl, 02h
call printStr
mov si, 0
mov di, 160 * 24
mov cx, len
mov bl, 04h
call printStr
mov ax, 4c00h
int 21h
printStr:
s:
mov al, [si]
mov es:[di], al
inc di
mov es:[di], bl
inc di
inc si
loop s
ret
code ends
end start
Screenshot of running test
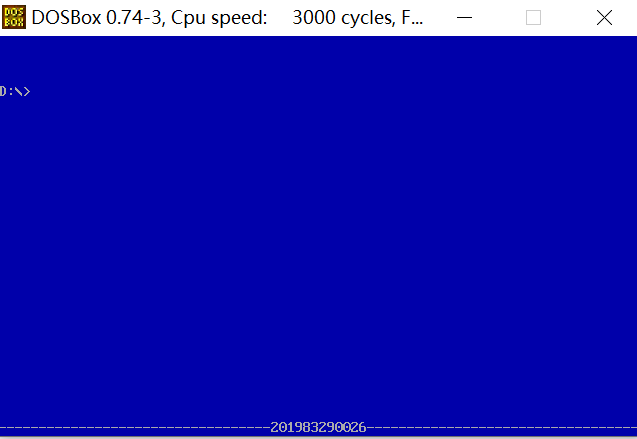
Experimental task 5
The program source code task5.asm is given
assume cs:code, ds:data
data segment
stu_no db '201983290026'
len = $ - stu_no
data ends
code segment
start:
mov ax,data
mov ds,ax
mov ax, 0b800h
mov es, ax
mov di, 0
mov bl, 17h
mov cx, 80 * 25
s1:
mov al, ' '
mov es:[di], al
inc di
mov es:[di], bl
inc di
loop s1
mov di, 160 * 24
mov cx, 34
s2:
mov al, '-'
mov es:[di], al
inc di
mov es:[di], bl
inc di
loop s2
mov di, 160 * 24 + 34 * 2
mov cx, 12
mov si, 0
s3:
mov al, [si]
mov es:[di], al
inc di
mov es:[di], bl
inc di
inc si
loop s3
mov di, 160 * 24 + 46 * 2
mov cx, 34
s4:
mov al, '-'
mov es:[di], al
inc di
mov es:[di], bl
inc di
loop s4
mov ax, 4c00h
int 21h
code ends
end start
Screenshot of running test
Experimental summary
- Starting from 0b800, there is a video memory with a size of 80x25. Each unit has two bytes. The high byte is placed in the data, and the low byte is used to set the display format.
- The same register can be used for many purposes. It can hold data of many different instructions.