1, Introduction
1 concept of particle swarm optimization algorithm
Particle swarm optimization (PSO) is an evolutionary computing technology. From the study of predation behavior of birds. The basic idea of particle swarm optimization algorithm is to find the optimal solution through the cooperation and information sharing among individuals in the group
The advantage of PSO is that it is simple and easy to implement, and there is no adjustment of many parameters. At present, it has been widely used in function optimization, neural network training, fuzzy system control and other application fields of genetic algorithm.
2 particle swarm optimization analysis
2.1 basic ideas
Particle swarm optimization (PSO) simulates birds in a flock of birds by designing a massless particle. The particle has only two attributes: speed and position. Speed represents the speed of movement and position represents the direction of movement. Each particle searches for the optimal solution separately in the search space, records it as the current individual extreme value, shares the individual extreme value with other particles in the whole particle swarm, and finds the optimal individual extreme value as the current global optimal solution of the whole particle swarm, All particles in the particle swarm adjust their speed and position according to the current individual extreme value found by themselves and the current global optimal solution shared by the whole particle swarm. The following dynamic diagram vividly shows the process of PSO algorithm: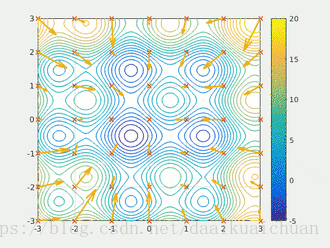
2 update rules
PSO is initialized as a group of random particles (random solutions). Then the optimal solution is found through iteration. In each iteration, the particle updates itself by tracking two "extreme values" (pbest, gbest). After finding these two optimal values, the particle updates its speed and position through the following formula.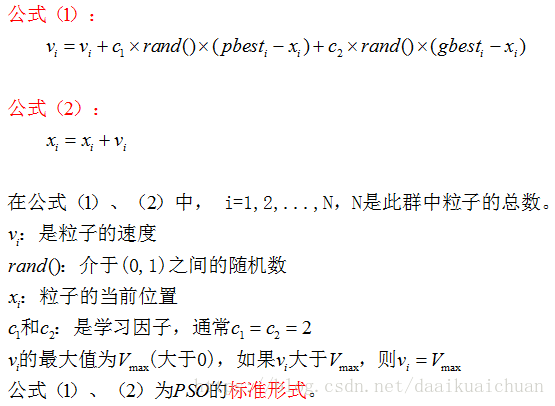
The first part of formula (1) is called [memory item], which represents the influence of the last speed and direction; The second part of formula (1) is called [self cognitive item], which is a vector from the current point to the best point of the particle itself, indicating that the action of the particle comes from its own experience; The third part of formula (1) is called [group cognition item], which is a vector from the current point to the best point of the population, reflecting the cooperation and knowledge sharing among particles. Particles determine the next movement through their own experience and the best experience of their companions. Based on the above two formulas, the standard form of PSO is formed.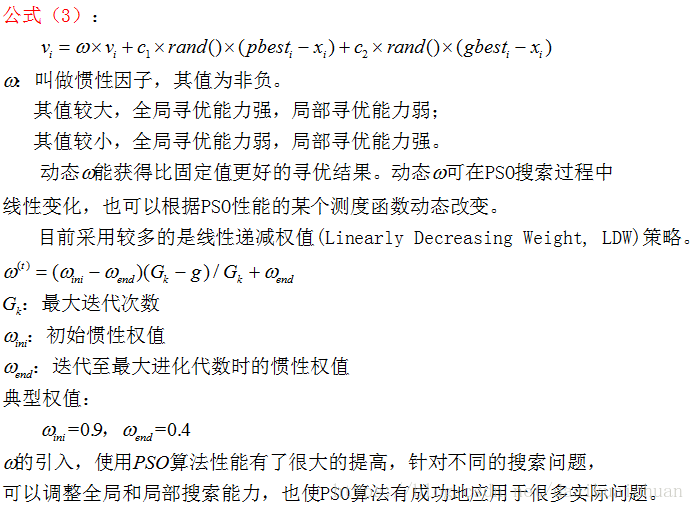
Formulas (2) and (3) are considered as standard PSO algorithms.
3 PSO algorithm flow and pseudo code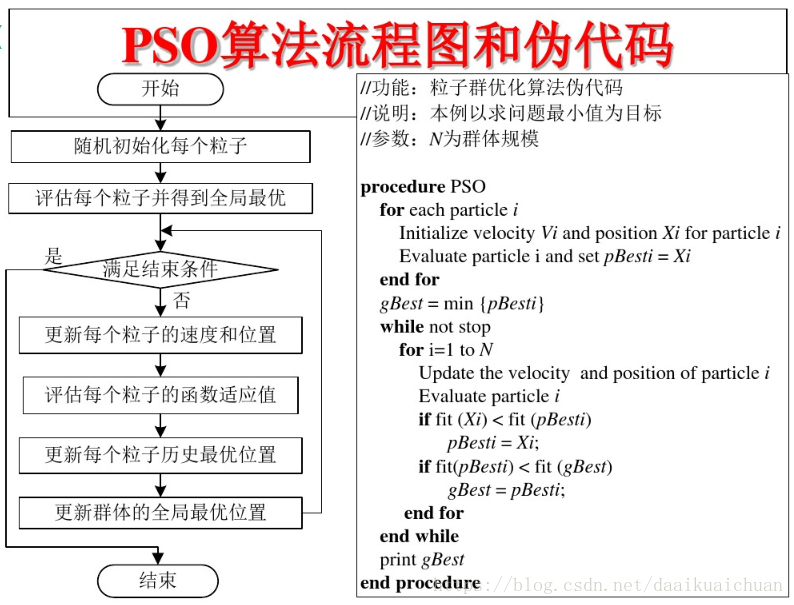
2, Source code
function varargout = GUI_PSO(varargin)
% GUI_PSO MATLAB code for GUI_PSO.fig
% GUI_PSO, by itself, creates a new GUI_PSO or raises the existing
% singleton*.
%
% H = GUI_PSO returns the handle to a new GUI_PSO or the handle to
% the existing singleton*.
%
% GUI_PSO('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in GUI_PSO.MyFirstText with the given input arguments.
%
% GUI_PSO('Property','Value',...) creates a new GUI_PSO or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before GUI_PSO_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stopf. All inputs are passed to GUI_PSO_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help GUI_PSO
% Last Modified by GUIDE v2.5 20-May-2015 09:59:43
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @GUI_PSO_OpeningFcn, ...
'gui_OutputFcn', @GUI_PSO_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before GUI_PSO is made visible.
function GUI_PSO_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to GUI_PSO (see VARARGIN)
% Choose default command line output for GUI_PSO
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes GUI_PSO wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = GUI_PSO_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
function popsize_Callback(hObject, eventdata, handles)
% hObject handle to popsize (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of popsize as text
% str2double(get(hObject,'String')) returns contents of popsize as a double
% --- Executes during object creation, after setting all properties.
function popsize_CreateFcn(hObject, eventdata, handles)
% hObject handle to popsize (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function stopf_Callback(hObject, eventdata, handles)
% hObject handle to stopf (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of stopf as text
% str2double(get(hObject,'String')) returns contents of stopf as a double
% --- Executes during object creation, after setting all properties.
function stopf_CreateFcn(hObject, eventdata, handles)
% hObject handle to stopf (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function c1_Callback(hObject, eventdata, handles)
% hObject handle to c1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of c1 as text
% str2double(get(hObject,'String')) returns contents of c1 as a double
% --- Executes during object creation, after setting all properties.
function c1_CreateFcn(hObject, eventdata, handles)
% hObject handle to c1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function c2_Callback(hObject, eventdata, handles)
% hObject handle to c2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of c2 as text
% str2double(get(hObject,'String')) returns contents of c2 as a double
% --- Executes during object creation, after setting all properties.
function c2_CreateFcn(hObject, eventdata, handles)
% hObject handle to c2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function w1_Callback(hObject, eventdata, handles)
% hObject handle to w1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of w1 as text
% str2double(get(hObject,'String')) returns contents of w1 as a double
% --- Executes during object creation, after setting all properties.
function w1_CreateFcn(hObject, eventdata, handles)
% hObject handle to w1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
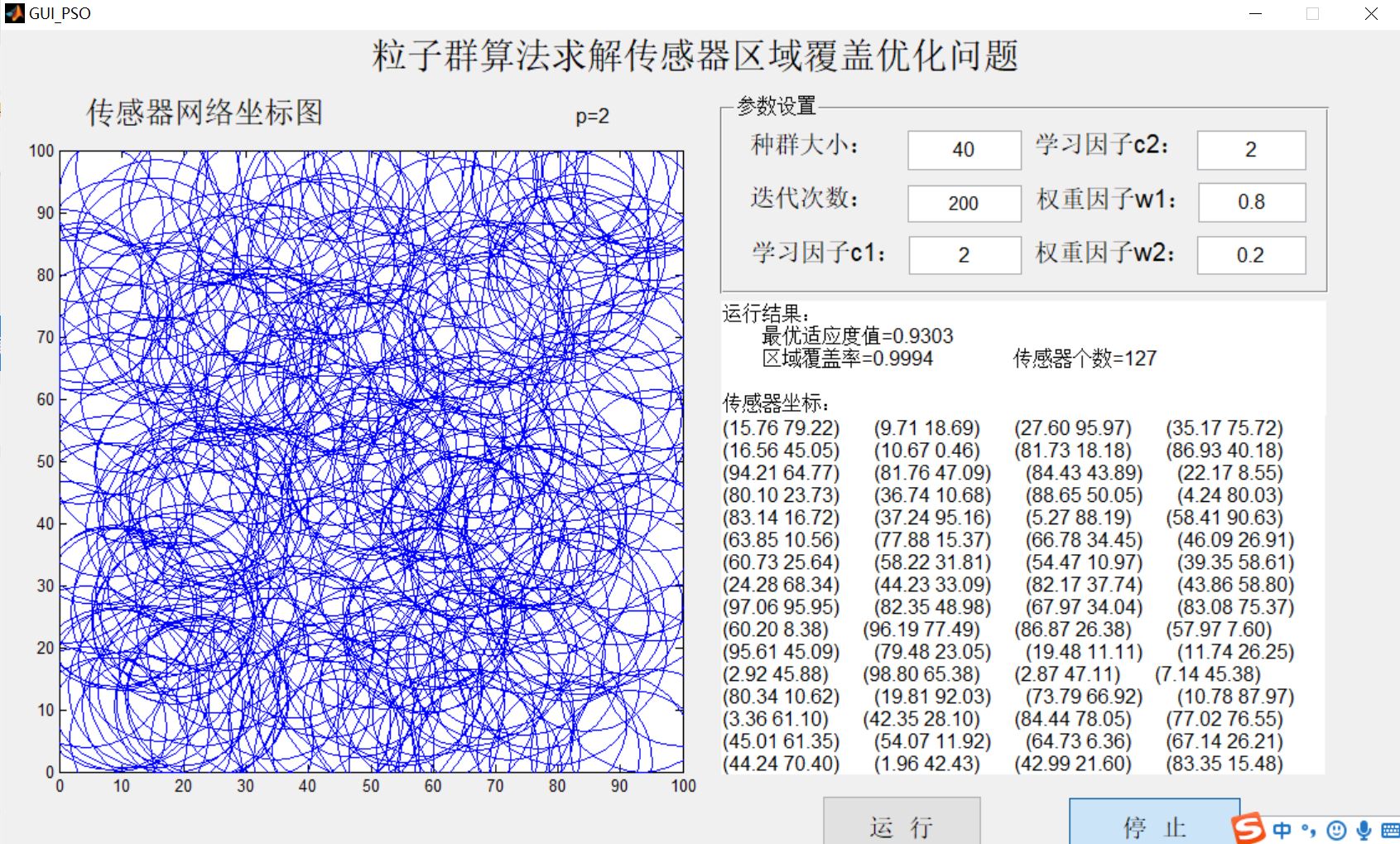
3, Operation results
4, Remarks
Complete code or write on behalf of QQ1575304183