Platform: Quanzhi A133 Android Q
Start process
Data flow throughout the whole article
sensor0 ==> mipi0 ==> csi0 ==> isp0 ==> scale0(vipp0) ==> vinc0(dma0) ==> video0
sensor1 ==> mipi1 ==> csi1 ==> isp0 ==> scale1(vipp1) ==> vinc1(dma1) ==> video1
sensor, mipi, csi, isp, scale and vinc are all v4l2_subddev, corresponding to the / dev / v4l2 subdevx node,
Video is video_device, corresponding to the / dev/videoX node.
Quanzhi A133 command view
ceres-b3:/sys/devices/platform/soc@2900000/2000800.vind # cat vi ***************************************************** VIN hardware feature list: mcsi 2, ncsi 1, parser 2, isp 1, vipp 4, dma 4 CSI_VERSION: CSI300_100, ISP_VERSION: ISP522_100 CSI_TOP: 336000000, CSI_ISP: 300000000 ***************************************************** vi0: ov13850_mipi => mipi0 => csi0 => isp0 => vipp0 input => hoff: 0, voff: 0, w: 2112, h: 1568, fmt: BGGR10 output => width: 1920, height: 1080, fmt: NV21 interface: MIPI, isp_mode: NORMAL, hflip: 0, vflip: 0 prs_in => x: 2112, y: 1568, hb: 3952, hs: 2766 buf => cnt: 3 size: 3133440 rest: 3, mode: software_update frame => cnt: 1046, lost_cnt: 0, error_cnt: 0 internal => avg: 32(ms), max: 33(ms), min: 32(ms) *****************************************************
Find the entrance first
Source location: longan/kernel/linux-4.9/drivers/media/platform/sunxi-vin/vin.c
static int __init vin_init(void) ret = sunxi_csi_platform_register(); //The corresponding probe() initializes the structure corresponding to csi, which contains v4l2_subdev,pads,ctrl, etc ret = sunxi_isp_platform_register(); //The corresponding probe() initializes the structure corresponding to csi, which contains v4l2_subdev,pads,ctrl, etc ret = sunxi_mipi_platform_register(); //The corresponding probe() initializes the structure corresponding to csi, which contains v4l2_subdev,pads,ctrl, etc ret = sunxi_flash_platform_register(); //The corresponding probe() initializes the structure corresponding to csi, which contains v4l2_subdev,pads,ctrl, etc ret = sunxi_scaler_platform_register(); //The corresponding probe() initializes the structure corresponding to csi, which contains v4l2_subdev,pads,ctrl, etc ret = sunxi_vin_core_register_driver(); //The corresponding probe() initializes the structure corresponding to csi, which contains v4l2_subdev,pads,ctrl, etc ret = platform_driver_register(&vin_driver);//General management, corresponding probe() registers video, v4l2_subdev,media, etc
Isn't it sensor v4l2_dev? Take gc030a as an example:
Source location: longan/kernel/linux-4.9/drivers/media/platform/sunxi-vin/modules/sensor/gc030a_mipi.c
First look at the structure representing the sensor:
struct sensor_info {
struct v4l2_subdev sd;
struct media_pad sensor_pads[SENSOR_PAD_NUM];
struct v4l2_ctrl_handler handler;
... ...
};
The structures corresponding to mipi, csi, isp, scale and vinc also contain these structures. Continue to look at sensor's probe():
static int sensor_probe(struct i2c_client *client,const struct i2c_device_id *id)
struct sensor_info *info;
info = kzalloc(sizeof(struct sensor_info), GFP_KERNEL);
cci_dev_probe_helper(sd, client, &sensor_ops, &cci_drv);
v4l2_i2c_subdev_init(sd, client, sensor_ops); //Initialize v4l2_subdev, setting v4l2_subdev_ops
snprintf(sd->name, sizeof(sd->name), "%s", cci_drv->name); //Set the name of subdev, here is gc030a_mipi
v4l2_set_subdev_hostdata(sd, cci_drv); //Private data saved as client
sd->internal_ops = &sensor_internal_ops; //Setup v4l2_subdev_internal_ops return function
//==============================================================
static const struct v4l2_subdev_internal_ops sensor_internal_ops = {
.registered = sensor_registered, //The s of the sensor will be called back here_ Power, init function
};
//==============================================================
sensor_init_controls(sd, &sensor_ctrl_ops); //Initialize v4l2_ control of subdev
/* Other initialization */
Are there many callback functions? mipi, csi, isp, scale and vinc are also similar, mainly in vin callback. The following vin probe().
Source location: longan/kernel/linux-4.9/drivers/media/platform/sunxi-vin/vin.c
static const struct of_device_id sunxi_vin_match[] = {
{.compatible = "allwinner,sunxi-vin-media",}, //==>Corresponding vind
{},
};
static int vin_probe(struct platform_device *pdev)
parse_modules_from_device_tree(vind); //Get the device tree information and the sensor auto scan list
parse_sensor_list_info(sensors, sensors->sensor_pos)
sprintf(sensor_list_cfg, "/vendor/etc/hawkview/sensor_list_cfg.ini");
cfg_section_init(§ion);
ret = cfg_read_ini(sensor_list_cfg, §ion);
if (strcmp(pos, "rear") == 0 || strcmp(pos, "REAR") == 0)
fetch_sensor_list(sl, "rear_camera_cfg", section);
else
fetch_sensor_list(sl, "front_camera_cfg", section);
ret = v4l2_device_register(dev, &vind->v4l2_dev); v4l2 In fact, the device registration does not register the device or device driver, but v4l2 Large structures are bundled with other equipment
media_device_init(&vind->media_dev); //Management for runtime data flow
ret = media_device_register(&vind->media_dev); //Register the character device and generate / dev/mediaX
ret = vin_md_register_entities(vind, dev->of_node){
__vin_register_module(vind, module, j)
modules->sensor[i].sd = __vin_subdev_register(vind, inst, inst->cam_name,inst->cam_addr >> 1,modules->sensor[i].type,module->sensors.sensor_bus_sel);
struct i2c_adapter *adapter = i2c_get_adapter(bus_sel);
sd = v4l2_i2c_new_subdev(v4l2_dev, adapter, name, addr, NULL);
v4l2_i2c_new_subdev_board(v4l2_dev, adapter, &info, probe_addrs);
client = i2c_new_device(adapter, info);
sd = i2c_get_clientdata(client); //Find the subdev instance from the private data of the client
v4l2_device_register_subdev(v4l2_dev, sd) //Register sensor subdev
err = sd->internal_ops->registered(sd);
//Callback to longan/kernel/linux-4.9/drivers/media/platform/sunxi-vin/vin-cci/cci_helper.c
static int sensor_registered(struct v4l2_subdev *sd)
v4l2_subdev_call(sd, core, s_power, PWR_ON); //Callback sensor_power
ret = v4l2_subdev_call(sd, core, init, 0); //Callback sensor_init
list_add_tail(&sd->list, &v4l2_dev->subdevs); //Just join the linked list
//Autofocus subdev registration
modules->act[i].sd = __vin_subdev_register(vind, inst, inst->act_name,inst->act_addr >> 1,modules->act[i].type,module->sensors.act_bus_sel);
//Register subdev for flash
ret = v4l2_device_register_subdev(&vind->v4l2_dev,module->modules.flash.sd);
//Register vinc subdev and / dev/videoX
for (i = 0; i < VIN_MAX_DEV; i++) { //Here VIN_MAX_DEV is 4
vind->vinc[i] = sunxi_vin_core_get_dev(i); //From Vin_ core_ Get vinc from GBL array
vin_md_register_core_entity(vind, vind->vinc[i]);
sd = &vinc->vid_cap.subdev;
v4l2_set_subdev_hostdata(sd, (void *)&vin_pipe_ops); //pipeline
ret = v4l2_device_register_subdev(&vind->v4l2_dev, sd);
if (sd->internal_ops && sd->internal_ops->registered)
err = sd->internal_ops->registered(sd); //Call back VIN of vinc here_ capture_ subdev_ Registered, register video_device
vin_init_video(sd->v4l2_dev, &vinc->vid_cap)
ret = video_register_device(&cap->vdev, VFL_TYPE_GRABBER, cap->vinc->id); /// dev/videoX is generated
}
//Register CSI subdev
ret = v4l2_device_register_subdev(&vind->v4l2_dev,vind->csi[i].sd);
//Register mipi subdev
ret = v4l2_device_register_subdev(&vind->v4l2_dev,vind->mipi[i].sd);
//Register isp subdev
ret = v4l2_device_register_subdev(&vind->v4l2_dev,vind->isp[i].sd);
//Register scaler(vipp) subdev
ret = v4l2_device_register_subdev(&vind->v4l2_dev,vind->scaler[i].sd);
}
//Last time I talked about v4l2_device_ register_ The subdev function simply adds subdev to v4l2_ In the device linked list, the real registration operation in batch will generate / dev / v4l2 subdevx
ret = v4l2_device_register_subdev_nodes(&vind->v4l2_dev);
}
entitys
entity in v4l2_subdev:
struct v4l2_subdev {
#if defined(CONFIG_MEDIA_CONTROLLER)
struct media_entity entity;
#endif
... ...
}
entity in video_device:
struct video_device
{
#if defined(CONFIG_MEDIA_CONTROLLER)
struct media_entity entity;
... ...
}
Thus, an entity represents a v4l2_subdev/video_device, a v4l2_subdev/video_device has only one entity.
pads
pads of sensor
Source code path: Drivers / media / platform / Sunxi VIN / modules / sensor / gc030a_ mipi.c
static int sensor_probe(struct i2c_client *client,const struct i2c_device_id *id)
└-> cci_dev_probe_helper(sd, client, &sensor_ops, &cci_drv);
└-> ci_media_entity_init_helper(sd, cci_drv);
switch (cci_drv->type) {
case CCI_TYPE_SENSOR: //sensor
si->sensor_pads[SENSOR_PAD_SOURCE].flags = MEDIA_PAD_FL_SOURCE; //Source, si is sensor_info
sd->entity.function = MEDIA_ENT_F_CAM_SENSOR;
return media_entity_pads_init(&sd->entity, SENSOR_PAD_NUM, si->sensor_pads); //Here is SENSOR_PAD_NUM is 1 and there is only 1 pad, which is bound to entity
case CCI_TYPE_ACT: //focusing
sd->entity.function = MEDIA_ENT_F_LENS;
return media_entity_pads_init(&sd->entity, 0, NULL); //No pad
case CCI_TYPE_FLASH: //flash lamp
sd->entity.function = MEDIA_ENT_F_FLASH;
return media_entity_pads_init(&sd->entity, 0, NULL); //No pad
-
Line 6, sensor_pads are sensors_ An array size of info is SENSOR_PAD_NUM, SENSOR_PAD_NUM is 1;
-
Line 8, media_entity_pads_init() binds the entity of pads and sensor s
Other Mipi, CSI, ISP and vinc are similar
Take isp as an example
longan/kernel/linux-4.9/drivers/media/platform/sunxi-vin/vin-isp/sunxi_isp.c
int __isp_init_subdev(struct isp_dev *isp) isp->isp_pads[ISP_PAD_SINK].flags = MEDIA_PAD_FL_SINK; //objective isp->isp_pads[ISP_PAD_SOURCE_ST].flags = MEDIA_PAD_FL_SOURCE; //source isp->isp_pads[ISP_PAD_SOURCE].flags = MEDIA_PAD_FL_SOURCE; //source sd->entity.function = MEDIA_ENT_F_PROC_VIDEO_PIXEL_FORMATTER; ret = media_entity_pads_init(&sd->entity, ISP_PAD_NUM, isp->isp_pads); //ISP here_ pad_ Num is 3, which means there are 3 pads
links
vin_probe () --> vin_create_media_links
Source location: longan/kernel/linux-4.9/drivers/media/platform/sunxi-vin/vin.c
static int vin_probe(struct platform_device *pdev)
media_device_init(&vind->media_dev); //Initialize the linked lists of entities, pads, links, etc
ret = media_device_register(&vind->media_dev); //Register the character device and generate / dev/mediaX
ret = vin_md_register_entities(vind, dev->of_node)
v4l2_device_register_subdev(... ...)
err = media_device_register_entity(v4l2_dev->mdev, entity); //Entity, pad and link will be added to media_ Several linked lists of device
ret = vin_create_media_links(vind);
for (i = 0; i < VIN_MAX_DEV; i++) {
vinc = vind->vinc[i]; //Find vinc
mipi = vind->mipi[vinc->mipi_sel].sd; //Find mipi
csi = vind->csi[vinc->csi_sel].sd; //Find csi
module = &vind->modules[vinc->rear_sensor]; //Find sensor
/*******************
* The corresponding dts is
*vinc0:vinc@0 {
* vinc0_csi_sel = <0>;
* vinc0_mipi_sel = <0>;
* vinc0_isp_sel = <0>;
* vinc0_isp_tx_ch = <0>;
* vinc0_tdm_rx_sel = <0xff>;
* vinc0_rear_sensor_sel = <0>;
* vinc0_front_sensor_sel = <1>;
* vinc0_sensor_list = <1>;
* status = "okay";
*};
******************/
//Create link: sensor = = > Mipi
sensor_link_to_mipi_csi(module, mipi);
ret = media_create_pad_link(source, SENSOR_PAD_SOURCE, sink, 0, 0);
//Create link: Mipi = = > CSI
source = &mipi->entity;
sink = &csi->entity;
ret = media_create_pad_link(source, MIPI_PAD_SOURCE,sink, CSI_PAD_SINK,MEDIA_LNK_FL_ENABLED);
//Create link: scaler = = > vinc
source = &scaler->entity;
sink = &cap_sd->entity;
ret = media_create_pad_link(source, SCALER_PAD_SOURCE,sink, VIN_SD_PAD_SINK,MEDIA_LNK_FL_ENABLED);
//Create link: vinc = = > Video
source = &cap_sd->entity;
sink = &vinc->vid_cap.vdev.entity;
ret = media_create_pad_link(source, VIN_SD_PAD_SOURCE,sink, 0, MEDIA_LNK_FL_ENABLED);
}
//Create link: CSI = = > ISP
for (i = 0; i < VIN_MAX_CSI; i++) {
csi = vind->csi[i].sd;
source = &csi->entity;
for (j = 0; j < VIN_MAX_ISP; j++) { //Thus, each csi is connected to each isp
isp = vind->isp[j].sd;
sink = &isp->entity;
ret = media_create_pad_link(source, CSI_PAD_SOURCE,sink, ISP_PAD_SINK, 0);
}
//Create link: ISP = = > scaler
for (i = 0; i < VIN_MAX_ISP; i++) {
isp = vind->isp[i].sd;
source = &isp->entity;
stat = vind->stat[i].sd;
sink = &stat->entity;
//There is one more creation link: ISP = = > stat
ret = media_create_pad_link(source, ISP_PAD_SOURCE_ST,sink, 0,MEDIA_LNK_FL_IMMUTABLE |MEDIA_LNK_FL_ENABLED);
for (j = 0; j < VIN_MAX_SCALER; j++) {
scaler = vind->scaler[j].sd;
sink = &scaler->entity;
ret = media_create_pad_link(source, ISP_PAD_SOURCE,sink, SCALER_PAD_SINK, 0);
}
}
ret = vin_setup_default_links(vind);
for (i = 0; i < VIN_MAX_DEV; i++) {
isp = vind->isp[vinc->isp_sel].sd;
scaler = vind->scaler[vinc->vipp_sel].sd;
link = media_entity_find_link(&isp->entity.pads[ISP_PAD_SOURCE],&scaler->entity.pads[SCALER_PAD_SINK]);
ret = media_entity_setup_link(link, MEDIA_LNK_FL_ENABLED);
p = &vinc->vid_cap.pipe;
vin_md_prepare_pipeline(p, &vinc->vid_cap.vdev.entity);
}
ret = v4l2_device_register_subdev_nodes(&vind->v4l2_dev);
struct media_link *link;
link = media_create_intf_link(&sd->entity,&vdev->intf_devnode->intf,MEDIA_LNK_FL_ENABLED);
In Vin_ create_ media_ Calling media_ in links () create_ pad_ Link (), did you find that some of the last parameters are 0 and some are MEDIA_LNK_FL_ENABLED.
So Vin_ create_ media_ The map displayed after links () should look like this:
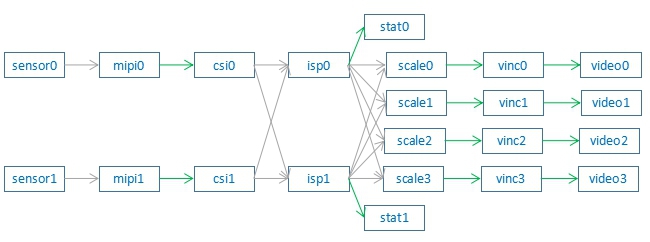
The gray arrow indicates that it has not been enable d
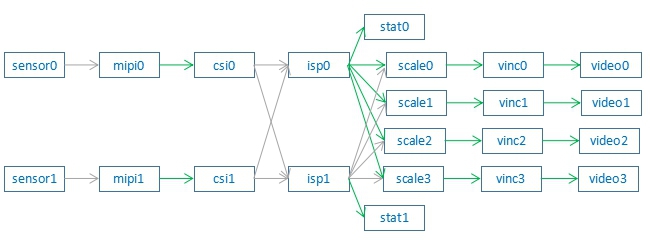
But, vin_setup_default_links() enables some ISPs = = > scale. Some changes have taken place in the links map, as follows:
Which isp to select is determined by the dts configuration of vincX. See the following vinc0:
vinc0:vinc@0 {
vinc0_csi_sel = <0>;
vinc0_mipi_sel = <0>;
vinc0_isp_sel = <0>; <====
vinc0_isp_tx_ch = <0>;
vinc0_tdm_rx_sel = <0xff>;
vinc0_rear_sensor_sel = <0>;
vinc0_front_sensor_sel = <1>;
vinc0_sensor_list = <1>;
status = "okay";
};
It can be seen from the above that the link of sensor = = > Mipi and CSI = = > ISP has not been enabled. Where is it enabled?
Source location: longan/kernel/linux-4.9/drivers/media/platform/sunxi-vin/vin-video/vin_video.c
static int vidioc_s_input(struct file *file, void *priv, unsigned int i) __vin_sensor_setup_link(vinc, module, valid_idx, 1) //module is the sensor struct v4l2_subdev *sensor = module->modules.sensor[i].sd; subdev = vind->mipi[vinc->mipi_sel].sd; entity = &sensor->entity; list_for_each_entry(link, &entity->links, list) ret = media_entity_setup_link(link, MEDIA_LNK_FL_ENABLED); //link enabling sensor = = > Mipi __csi_isp_setup_link(vinc, 1) csi = vind->csi[vinc->csi_sel].sd; isp = vind->isp[vinc->isp_sel].sd; link = media_entity_find_link(&csi->entity.pads[CSI_PAD_SOURCE],&isp->entity.pads[ISP_PAD_SINK]); ret = media_entity_setup_link(link, MEDIA_LNK_FL_ENABLED);
So the final links map looks like this:
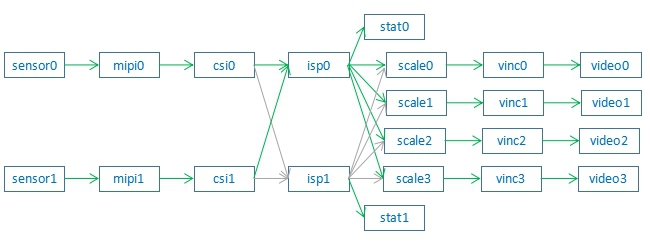
ps: the green arrow indicates enabled, and the gray arrow indicates not enabled.
pipeline
pipeline initialization
pipeline is equivalent to the navigation line of a map. The starting point of navigation is sensorX and the end point is videoX
Let's think about it first. Where is the pipeline saved?
struct vin_core {
... ...
const struct vin_pipeline_ops *pipeline_ops;
struct vin_vid_cap vid_cap;
};
struct vin_vid_cap {
struct vin_pipeline pipe;
};
struct vin_pipeline {
struct media_pipeline pipe;
struct v4l2_subdev *sd[VIN_IND_MAX];
};
It can be seen that each vinc has a pipeline, Vin_ The pipeline stores the v4l2#u subdev that this "navigation line" passes through.
The calling process vin_probe() -- > vin_setup_default_links() -- > vin_md_prepare_pipeline() can be found above
vin_md_prepare_pipeline() is executed in a for loop
p = &vinc->vid_cap.pipe;
vin_md_prepare_pipeline(p, &vinc->vid_cap.vdev.entity);
while (1) {
struct media_pad *pad = NULL;
/* Find remote source pad */
for (i = 0; i < me->num_pads; i++) {
struct media_pad *spad = &me->pads[i];
if (!(spad->flags & MEDIA_PAD_FL_SINK))
continue;
pad = media_entity_remote_pad(spad);
}
if (pad == NULL) //No pad found, exit
break;
sd = media_entity_to_v4l2_subdev(pad->entity);
switch (sd->grp_id) {
case VIN_GRP_ID_SENSOR:
p->sd[VIN_IND_SENSOR] = sd;
break;
case VIN_GRP_ID_MIPI:
p->sd[VIN_IND_MIPI] = sd;
break;
case VIN_GRP_ID_CSI:
p->sd[VIN_IND_CSI] = sd;
break;
case VIN_GRP_ID_TDM_RX:
p->sd[VIN_IND_TDM_RX] = sd;
break;
case VIN_GRP_ID_ISP:
p->sd[VIN_IND_ISP] = sd;
break;
case VIN_GRP_ID_SCALER:
p->sd[VIN_IND_SCALER] = sd;
break;
case VIN_GRP_ID_CAPTURE:
p->sd[VIN_IND_CAPTURE] = sd;
break;
default:
break;
}
me = &sd->entity;
}
Line 11, look at the implementation of media_entity_remote_pad()
struct media_pad *media_entity_remote_pad(struct media_pad *pad)
{
struct media_link *link;
list_for_each_entry(link, &pad->entity->links, list) {
if (!(link->flags & MEDIA_LNK_FL_ENABLED))
continue;
if (link->source == pad)
return link->sink;
if (link->sink == pad)
return link->source;
}
return NULL;
}
In lines 5-14, only the link of MEDIA_LNK_FL_ENABLED will be returned.
It can be seen from the above that when the program runs here, some link s are not enable d. That is to say, the pipeline is not complete at this time. When will it be complete?
The pipeline of vinc0 should look like this:
p |--sd[VIN_IND_SENSOR] = NULL |--sd[VIN_IND_MIPI] = NULL |--sd[VIN_IND_CSI] = NULL |--sd[VIN_IND_ISP] = isp0 |--sd[VIN_IND_SCALER] = scale0 |--sd[VIN_IND_CAPTURE] = vinc0
Source location: longan/kernel/linux-4.9/drivers/media/platform/sunxi-vin/vin-video/vin_video.c
static int vidioc_s_input(struct file *file, void *priv, unsigned int i)
__vin_sensor_setup_link(vinc, module, valid_idx, 1) //module is the sensor
struct v4l2_subdev *sensor = module->modules.sensor[i].sd;
subdev = vind->mipi[vinc->mipi_sel].sd;
entity = &sensor->entity;
list_for_each_entry(link, &entity->links, list)
ret = media_entity_setup_link(link, MEDIA_LNK_FL_ENABLED); //link enabling sensor = = > Mipi
__csi_isp_setup_link(vinc, 1)
csi = vind->csi[vinc->csi_sel].sd;
isp = vind->isp[vinc->isp_sel].sd;
link = media_entity_find_link(&csi->entity.pads[CSI_PAD_SOURCE],&isp->entity.pads[ISP_PAD_SINK]);
ret = media_entity_setup_link(link, MEDIA_LNK_FL_ENABLED);
ret = vin_pipeline_call(vinc, open, &cap->pipe, &cap->vdev.entity, true);
//The open callback _vin_pipeline_open
static int __vin_pipeline_open(struct vin_pipeline *p,struct media_entity *me, bool prepare)
vin_md_prepare_pipeline(p, me); //Again
The pipeline of vinc0 should look like this:
p |--sd[VIN_IND_SENSOR] = sensor0 |--sd[VIN_IND_MIPI] = mipi0 |--sd[VIN_IND_CSI] = csi0 |--sd[VIN_IND_ISP] = isp0 |--sd[VIN_IND_SCALER] = scale0 |--sd[VIN_IND_CAPTURE] = vinc0
Use of pipeline
After working hard to build a pipeline, it must be used.
It seems that this SDK does not use a function like media_entity_pipeline_start().
The use of pipeline is also simple and rough, such as:
v4l2_subdev_call(cap->pipe.sd[VIN_IND_ISP], core, init, 0);
Directly call the callback function of subdev.
When using vidic_s_input or vidic_streamon, you can clearly know which subdev to operate through the pipe array in vid_cap.
finish
The above is the author's learning notes. If you find something wrong, please don't hesitate to give advice. Thank you.