an introduction to
library
It is mainly used for robot and game AI instead of finite element state machine
characteristic:
- You can perform asynchronous actions
- You can create a tree at run time
- Custom trees can be converted into plug-in links and loaded dynamically at run time
- Including log / optimization architecture, which can be visualized, recorded, replayed and analyzed
What is a behavior tree?
Behavior tree (BT) is a virtual entity whose structure transforms between different automatic terminal tasks, such as robots or games
Advantages of BT over FSM:
- They are essentially hierarchical
- Their graphics represent the meaning of language
- They are more expressive
Why do we need a behavior tree?
be used for Component Based Software Engineering
A good software architecture has the following characteristics:
- modularization
- Reusable components
- Compressibility
- Good separation of concerns
Basic learning
Introduce BT
tick() trigger
When TreeNode is triggered, NodeStatus is returned
- SUCCESS
- FAILURE
- RUNNING
RUNNING means asynchronous execution
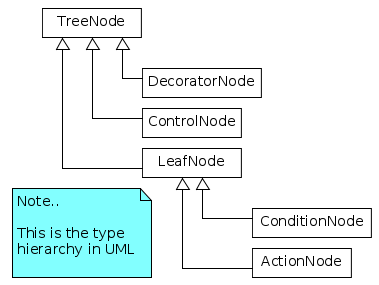
Type of node
Control nodes have 1-N child nodes. After receiving a tick, the tick will be propagated to one or more child nodes
Decorator nodes are similar to control nodes, but have only one child node
Action nodes are leaf nodes without child nodes. Users need to implement their own action nodes to perform actual tasks
Condition nodes are equal to action nodes, but they are always atomic and synchronous. They cannot return to the RUNNING state or change the system state
Sequence example
SequenceNode most used by BT
The child nodes of the control node are ordered and executed from left to right
In short:
- The child node returns success. tick the next node
- The child node returns failure, no child node will tick, and the sequence returns failure
- If all child nodes return success, the sequence returns success
Decorator
Purpose:
- Convert results received from child nodes
- Stop execution of child nodes
- Repeat tick child nodes, depending on the type of decoration node
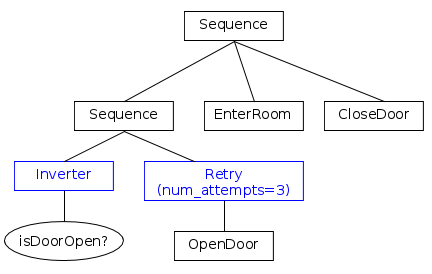
The node Inverter decorator reverses the returned value
Node Retry repeats child nodes N times
The above node combination will cancel all actions after the door is opened
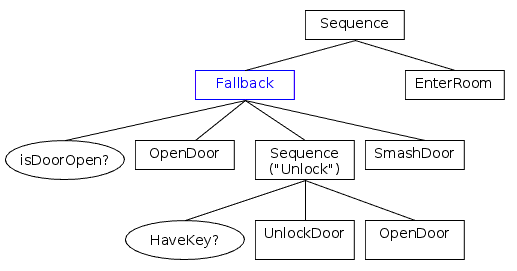
FallbackNodes
Also known as Selectors, these nodes, as the name suggests, can express the fallback strategy, that is, what to do next if a child node returns FAILURE.
Trigger in sequence:
- If the child node returns a failure, tick the next node
- If the return is successful, the tick node is no longer, and the Fallback returns success
course
Create tree
code
#include <iostream>
#include <behaviortree_cpp_v3/bt_factory.h>
class ApproachGripper : public BT::SyncActionNode
{
public:
explicit ApproachGripper(const std::string &name) : BT::SyncActionNode(name, {})
{}
BT::NodeStatus tick() override
{
std::cout << "ApproachObject: " << name() << std::endl;
return BT::NodeStatus::SUCCESS;
}
};
bool batteryOK = false;
BT::NodeStatus CheckBattery()
{
if (batteryOK) {
std::cout << "[ Battery: OK ]" << std::endl;
return BT::NodeStatus::SUCCESS;
} else {
std::cout << "[ Battery: BAD ]" << std::endl;
return BT::NodeStatus::FAILURE;
}
}
BT::NodeStatus Charge()
{
std::cout << "[ Charge Battery ]" << std::endl;
return BT::NodeStatus::SUCCESS;
}
class GripperInterface
{
public:
GripperInterface() : _open(true)
{}
BT::NodeStatus open()
{
_open = true;
std::cout << "GripperInterface::open" << std::endl;
return BT::NodeStatus::SUCCESS;
}
BT::NodeStatus close()
{
_open = false;
std::cout << "GripperInterface::close" << std::endl;
return BT::NodeStatus::SUCCESS;
}
private:
bool _open;
};
int main()
{
BT::BehaviorTreeFactory factory;
factory.registerNodeType<ApproachGripper>("ApproachGripper");
factory.registerSimpleCondition("CheckBattery",
[](BT::TreeNode &node) { return CheckBattery(); });
factory.registerSimpleCondition("Charge",
[](BT::TreeNode &node) { return Charge(); });
GripperInterface gripper;
factory.registerSimpleAction("OpenGripper",
[&gripper](BT::TreeNode &node) { return gripper.open(); });
factory.registerSimpleAction("CloseGripper",
[&gripper](BT::TreeNode &node) { return gripper.close(); });
auto tree = factory.createTreeFromFile("../my_tree1.xml");
tree.tickRoot();
}
<?xml version="1.0"?>
<root main_tree_to_execute="BehaviorTree">
<!-- // -->
<BehaviorTree ID="BehaviorTree">
<Sequence>
<Fallback>
<Condition ID="CheckBattery"/>
<Condition ID="Charge"/>
</Fallback>
<Action ID="OpenGripper"/>
<Action ID="ApproachGripper"/>
<Action ID="CloseGripper"/>
</Sequence>
</BehaviorTree>
<!-- // -->
<TreeNodesModel>
<Action ID="ApproachGripper"/>
<Condition ID="Charge"/>
<Condition ID="CheckBattery"/>
<Action ID="CloseGripper"/>
<Action ID="OpenGripper"/>
</TreeNodesModel>
<!-- // -->
</root>
The results after execution are as follows
[ Battery: BAD ] [ Charge Battery ] GripperInterface::open ApproachObject: ApproachGripper GripperInterface::close
Only nodes with < treenodesmodel > can be read with Groot normally
Input and output interfaces
The behavior tree supports the use of interfaces (ports) to transmit data streams, which is simple to use and type safe
Input interface
The correct input has:
- Static strings can be parsed by nodes
- The "pointer" to an entry on the blackboard is identified by a key
blackboard is a simple key / value store shared by all nodes
An entry in blackboard is equivalent to a key / value pair (semantic reference database)
The input interface can read the entry in the blackboard, and the output port can write the entry
Output interface
The output port can be a string or an entry of the blackboard
Strings like {the_answer} represent the name of the on the blackboard_ Entry for answer
code
//
// Created by jiang on 2021/9/18.
//
#include <behaviortree_cpp_v3/action_node.h>
#include <behaviortree_cpp_v3/bt_factory.h>
using namespace BT;
class SaySomething : public SyncActionNode
{
public:
SaySomething(const std::string &name, const NodeConfiguration &config) :
SyncActionNode(name, config)
{}
static PortsList providedPorts()
{
return {InputPort<std::string>("message")};
}
protected:
NodeStatus tick() override
{
Optional<std::string> msg = getInput<std::string>("message");
if (!msg) {
throw RuntimeError("missing required input [message]: ", msg.error());
}
std::cout << "Robot says: " << msg.value() << std::endl;
return NodeStatus::SUCCESS;
}
};
NodeStatus SaySomethingSimple(TreeNode &self)
{
Optional<std::string> msg = self.getInput<std::string>("message");
if (!msg) {
throw RuntimeError("missing required input [message]: ", msg.error());
}
std::cout << "Robot says: " << msg.value() << std::endl;
return NodeStatus::SUCCESS;
}
class ThinkWhatToSay : public SyncActionNode
{
public:
ThinkWhatToSay(const std::string &name, const NodeConfiguration &config) :
SyncActionNode(name, config)
{}
static PortsList providedPorts()
{
return {OutputPort<std::string>("text")};
}
protected:
NodeStatus tick() override
{
setOutput("text", "The answer is 42");
return NodeStatus::SUCCESS;
}
};
int main()
{
BehaviorTreeFactory factory;
factory.registerNodeType<SaySomething>("SaySomething");
factory.registerNodeType<ThinkWhatToSay>("ThinkWhatToSay");
PortsList saySomethingPorts = {InputPort<std::string>("message")};
factory.registerSimpleAction("SaySomething2", SaySomethingSimple, saySomethingPorts);
auto tree = factory.createTreeFromFile("../../test_port/port1.xml");
tree.tickRoot();
return 0;
}
<?xml version="1.0"?>
<root main_tree_to_execute="BehaviorTree">
<!-- // -->
<BehaviorTree ID="BehaviorTree">
<Sequence>
<Action ID="SaySomething" message="start thinking..."/>
<Action ID="ThinkWhatToSay" text="{the_answer}"/>
<Action ID="SaySomething" message="{the_answer}"/>
<Action ID="SaySomething2" message="say something 2 works"/>
<Action ID="SaySomething2" message="{the_answer}"/>
</Sequence>
</BehaviorTree>
<!-- // -->
<TreeNodesModel>
<Action ID="SaySomething">
<input_port name="message"/>
</Action>
<Action ID="SaySomething2">
<input_port name="message"/>
</Action>
<Action ID="ThinkWhatToSay">
<output_port name="text"/>
</Action>
</TreeNodesModel>
<!-- // -->
</root>
General interface
By overloading the template function, you can convert the string into a custom class structure
template <typename T>
inline T convertFromString(StringView str);
// for example
struct Position2D
{
double x;
double y;
};
namespace BT
{
template <> inline Position2D convertFromString(StringView str)
{
// The next line should be removed...
printf("Converting string: \"%s\"\n", str.data() );
// We expect real numbers separated by semicolons
auto parts = splitString(str, ';');
if (parts.size() != 2)
{
throw RuntimeError("invalid input)");
}
else{
Position2D output;
output.x = convertFromString<double>(parts[0]);
output.y = convertFromString<double>(parts[1]);
return output;
}
}
} // end namespace BT
Registered interface usage
static PortsList providedPorts()
{
// Optionally, a port can have a human readable description
const char* description = "Simply print the goal on console...";
return { InputPort<Position2D>("target", description) };
}
Use in xml files
<SequenceStar name="root">
<CalculateGoal goal="{GoalPosition}" />
<PrintTarget target="{GoalPosition}" />
<SetBlackboard output_key="OtherGoal" value="-1;3" />
<PrintTarget target="{OtherGoal}" />
</SequenceStar>
Sequential and asynchronous action nodes
The difference between SequenceNode and ReactiveSequence
Asynchronous actions have their own threads. This allows the user to use blocking functions, but to return the executed process to the tree.
Examples of robot movement:
//
// Created by jiang on 2021/9/18.
//
#include <behaviortree_cpp_v3/bt_factory.h>
#include <behaviortree_cpp_v3/action_node.h>
#include <thread>
using namespace BT;
inline void SleepMS(int ms)
{
std::this_thread::sleep_for(std::chrono::milliseconds(ms));
}
struct Pose2D
{
double x;
double y;
double theta;
};
namespace BT
{
template<>
inline Pose2D convertFromString(StringView str)
{
auto parts = splitString(str, ';');
if (parts.size() != 3) {
throw RuntimeError("invalid input)");
} else {
Pose2D output{
convertFromString<double>(parts[0]),
convertFromString<double>(parts[1]),
convertFromString<double>(parts[2]),
};
return output;
}
}
}
class MoveBaseAction : public AsyncActionNode
{
public:
MoveBaseAction(const std::string &name, const NodeConfiguration &config) :
AsyncActionNode(name, config)
{}
static PortsList providedPorts()
{
return {InputPort<Pose2D>("goal")};
}
protected:
NodeStatus tick() override;
};
NodeStatus MoveBaseAction::tick()
{
std::cout << "move base thread id: " << std::this_thread::get_id();
Pose2D goal{};
if (!getInput<Pose2D>("goal", goal)) {
throw RuntimeError("missing required input [goal]");
}
printf("[MoveBase STATED]. goal: x=%.f y = %.1f theta=%.2f\n", goal.x, goal.y, goal.theta);
int count = 0;
while (!isHaltRequested() && count++ < 25) {
SleepMS(10);
}
std::cout << "[MoveBase FINISHED]" << std::endl;
return isHaltRequested() ? NodeStatus::FAILURE : NodeStatus::SUCCESS;
}
class SaySomething : public SyncActionNode
{
public:
SaySomething(const std::string &name, const NodeConfiguration &config) :
SyncActionNode(name, config)
{}
static PortsList providedPorts()
{
return {InputPort<std::string>("message")};
}
protected:
NodeStatus tick() override
{
Optional<std::string> msg = getInput<std::string>("message");
if (!msg) {
throw RuntimeError("missing required input [message]: ", msg.error());
}
std::cout << "Robot says: " << msg.value() << std::endl;
return NodeStatus::SUCCESS;
}
};
NodeStatus CheckBattery(TreeNode &node)
{
std::cout << "[ Battery: OK ]" << std::endl;
return NodeStatus::SUCCESS;
}
int main()
{
BehaviorTreeFactory factory;
factory.registerSimpleCondition("BatteryOK", CheckBattery);
factory.registerNodeType<MoveBaseAction>("MoveBase");
factory.registerNodeType<SaySomething>("SaySomething");
auto tree = factory.createTreeFromFile("../../test_async/async.xml");
NodeStatus status;
std::cout << "main thread id: " << std::this_thread::get_id();
std::cout << "\n--- 1st executeTick() --- " << std::endl;
status = tree.tickRoot();
std::cout << "result : " << status << std::endl;
SleepMS(150);
std::cout << "\n--- 2nd executeTick() ---" << std::endl;
status = tree.tickRoot();
std::cout << "result : " << status << std::endl;
SleepMS(150);
std::cout << "\n--- 3rd executeTick() ---" << std::endl;
status = tree.tickRoot();
std::cout << "result : " << status << std::endl;
std::cout << std::endl;
return 0;
}
<?xml version="1.0"?>
<root main_tree_to_execute="BehaviorTree">
<BehaviorTree ID="BehaviorTree">
<Sequence>
<Action ID="BatteryOK"/>
<Action ID="SaySomething" message="mission started..."/>
<Action ID="MoveBase" goal="1.0;2.0;3.0"/>
<Action ID="SaySomething" message="mission completed!"/>
</Sequence>
</BehaviorTree>
<TreeNodesModel>
<Action ID="SaySomething">
<input_port name="message"/>
</Action>
<Action ID="MoveBase">
<input_port name="goal"/>
</Action>
</TreeNodesModel>
</root>
MoveBaseAction::tick() is executed in the thread, while MoveBaseAction::executeTick() is executed in the main thread
It is responsible to implement the halt() function to stop the task
The first and second returns RUNNING, and the third returns SUCCESS
RUNNING stops the execution of subsequent tasks for the sequence
Subtree and log
Subtree means that a hierarchical behavior tree can be created, and many small reusable behavior trees can be used to form a large behavior tree
example
<root main_tree_to_execute = "MainTree">
<BehaviorTree ID="DoorClosed">
<Sequence name="door_closed_sequence">
<Inverter>
<IsDoorOpen/>
</Inverter>
<RetryUntilSuccesful num_attempts="4">
<OpenDoor/>
</RetryUntilSuccesful>
<PassThroughDoor/>
</Sequence>
</BehaviorTree>
<BehaviorTree ID="MainTree">
<Fallback name="root_Fallback">
<Sequence name="door_open_sequence">
<IsDoorOpen/>
<PassThroughDoor/>
</Sequence>
<SubTree ID="DoorClosed"/>
<PassThroughWindow/>
</Fallback>
</BehaviorTree>
</root>
Use < subtree id = "doorclosed" / > to call the subtree
Logging is a mechanism used to display and record changes in publishing status
int main()
{
using namespace BT;
BehaviorTreeFactory factory;
// register all the actions into the factory
// We don't show how these actions are implemented, since most of the
// times they just print a message on screen and return SUCCESS.
// See the code on Github for more details.
factory.registerSimpleCondition("IsDoorOpen", std::bind(IsDoorOpen));
factory.registerSimpleAction("PassThroughDoor", std::bind(PassThroughDoor));
factory.registerSimpleAction("PassThroughWindow", std::bind(PassThroughWindow));
factory.registerSimpleAction("OpenDoor", std::bind(OpenDoor));
factory.registerSimpleAction("CloseDoor", std::bind(CloseDoor));
factory.registerSimpleCondition("IsDoorLocked", std::bind(IsDoorLocked));
factory.registerSimpleAction("UnlockDoor", std::bind(UnlockDoor));
// Load from text or file...
auto tree = factory.createTreeFromText(xml_text);
// This logger prints state changes on console
StdCoutLogger logger_cout(tree);
// This logger saves state changes on file
FileLogger logger_file(tree, "bt_trace.fbl");
// This logger stores the execution time of each node
MinitraceLogger logger_minitrace(tree, "bt_trace.json");
#ifdef ZMQ_FOUND
// This logger publish status changes using ZeroMQ. Used by Groot
PublisherZMQ publisher_zmq(tree);
#endif
printTreeRecursively(tree.rootNode());
//while (1)
{
NodeStatus status = NodeStatus::RUNNING;
// Keep on ticking until you get either a SUCCESS or FAILURE state
while( status == NodeStatus::RUNNING)
{
status = tree.tickRoot();
CrossDoor::SleepMS(1); // optional sleep to avoid "busy loops"
}
CrossDoor::SleepMS(2000);
}
return 0;
}
Groot uses the status information published by ZMQ
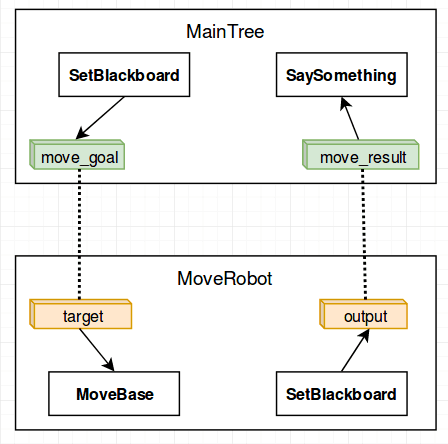
Interface remapping
In the CrossDoor example, we see that the subtree looks like a single leaf node from the perspective of its parent node (MainTree in the example). In addition, in order to avoid name conflicts in very large trees, any tree and subtree use different blackboard instances.
For this reason, we need to explicitly connect the port of a tree to the port of its subtree.
example
<root main_tree_to_execute = "MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="main_sequence">
<SetBlackboard output_key="move_goal" value="1;2;3" />
<SubTree ID="MoveRobot" target="move_goal" output="move_result" />
<SaySomething message="{move_result}"/>
</Sequence>
</BehaviorTree>
<BehaviorTree ID="MoveRobot">
<Fallback name="move_robot_main">
<SequenceStar>
<MoveBase goal="{target}"/>
<SetBlackboard output_key="output" value="mission accomplished" />
</SequenceStar>
<ForceFailure>
<SetBlackboard output_key="output" value="mission failed" />
</ForceFailure>
</Fallback>
</BehaviorTree>
</root>
- MoveRobot is a subtree contained in MainTree
- Want to connect the port of MoveRobot with the port of MainTree
- Use XML tags, where the words internal/external refer to the child tree and its parent tree, respectively
<SubTree ID="MoveRobot" target="move_goal" output="move_result" />
move_goal passes in the target of the subtree and outputs the result output of the subtree to move_result
Packaging legacy code
use λ function
class LegacyClass {
public:
bool method() {
return true;
}
}
LegacyClass legacy;
auto wrapFunc = [&legacy] (NodeTree &node) -> NodeStatus {
...
return ...
}
PortsList ports = { ... };
factory.registerSimpleAction("...", wrapFunc, ports);
...
Additional parameters
Method 1: use NodeBuilder
Suppose the node's constructor has more parameters
Action_A(const std::string& name, const NodeConfiguration& config,
int arg1, double arg2, std::string arg3 ):
SyncActionNode(name, config),
_arg1(arg1),
_arg2(arg2),
_arg3(arg3) {}
A NodeBuilder function is created
NodeBuilder builder_A =
[](const std::string& name, const NodeConfiguration& config)
{
return std::make_unique<Action_A>( name, config, 42, 3.14, "hello world" );
};
Then pass in the second parameter of the registration function
factory.registerBuilder<Action_A>( "Action_A", builder_A);
Method 2: use initialization method
void init( int arg1, double arg2, const std::string& arg3 )
{
_arg1 = (arg1);
_arg2 = (arg2);
_arg3 = (arg3);
}
Calling functions by type using C++ RTTI
for( auto& node: tree.nodes )
{
if( auto action_B = dynamic_cast<Action_B*>( node.get() ))
{
action_B->init( 42, 3.14, "hello world");
}
}
Synergetic process
The behavior tree provides two convenient abstractions for creating asynchronous actions. For the following actions:
- It takes a long time to finish
- RUNNING may be returned
- Can be stopped
The first type is AsyncActionNode, which executes the tick() function in an isolated thread
In this tutorial, the CoroActionNode is introduced to complete actions with similar results using a coroutine
Coroutines do not generate new threads, are more efficient, and do not need to worry about thread safety
In the collaboration process, when the user wants to cancel the executed action, the yield method needs to be explicitly called
CoroActionNode encapsulates the yield function into setstatus runningyield()
example
typedef std::chrono::milliseconds Milliseconds;
class MyAsyncAction: public CoroActionNode
{
public:
MyAsyncAction(const std::string& name):
CoroActionNode(name, {})
{}
private:
// This is the ideal skeleton/template of an async action:
// - A request to a remote service provider.
// - A loop where we check if the reply has been received.
// - You may call setStatusRunningAndYield() to "pause".
// - Code to execute after the reply.
// - A simple way to handle halt().
NodeStatus tick() override
{
std::cout << name() <<": Started. Send Request to server." << std::endl;
TimePoint initial_time = Now();
TimePoint time_before_reply = initial_time + Milliseconds(100);
int count = 0;
bool reply_received = false;
while( !reply_received )
{
if( count++ == 0)
{
// call this only once
std::cout << name() <<": Waiting Reply..." << std::endl;
}
// pretend that we received a reply
if( Now() >= time_before_reply )
{
reply_received = true;
}
if( !reply_received )
{
// set status to RUNNING and "pause/sleep"
// If halt() is called, we will NOT resume execution
setStatusRunningAndYield();
}
}
// This part of the code is never reached if halt() is invoked,
// only if reply_received == true;
std::cout << name() <<": Done. 'Waiting Reply' loop repeated "
<< count << " times" << std::endl;
cleanup(false);
return NodeStatus::SUCCESS;
}
// you might want to cleanup differently if it was halted or successful
void cleanup(bool halted)
{
if( halted )
{
std::cout << name() <<": cleaning up after an halt()\n" << std::endl;
}
else{
std::cout << name() <<": cleaning up after SUCCESS\n" << std::endl;
}
}
void halt() override
{
std::cout << name() <<": Halted." << std::endl;
cleanup(true);
// Do not forget to call this at the end.
CoroActionNode::halt();
}
Timepoint Now()
{
return std::chrono::high_resolution_clock::now();
};
};
<root >
<BehaviorTree>
<Timeout msec="150">
<SequenceStar name="sequence">
<MyAsyncAction name="action_A"/>
<MyAsyncAction name="action_B"/>
</SequenceStar>
</Timeout>
</BehaviorTree>
</root>