JDK1. The ConcurrentHashMap before 7 was implemented using the segment lock mechanism, jdk1 8. Use array + linked list + red black tree data structure and CAS atomic operation to realize concurrent HashMap; This paper will introduce the implementation schemes of these two methods and their differences.
HashMap is not thread safe. The classes that implement thread safety are HashTable and ConcurrentHashMap
So here comes the question...
- Why is HashTable slow? What is its concurrency? What is the concurrency of ConcurrentHashMap?
- ConcurrentHashMap is in jdk1 7 and jdk1 What is the difference between the implementation in 8? JDK1.8 solved jdk1 What is the problem in 7
- ConcurrentHashMap JDK1.7. What is the principle of implementation? Segmented locking mechanism
- ConcurrentHashMap JDK1.8. What is the principle of implementation? Array + linked list + red black tree, CAS
- ConcurrentHashMap JDK1. What is the default value of the number of segments (concurrencyLevel) in 7? Why can't the capacity be expanded once initialized?
- ConcurrentHashMap JDK1.7. What is its mechanism?
- ConcurrentHashMap JDK1.7 how to expand the capacity? Rehash (Note: the segment array cannot be expanded. The expansion is the expansion of the array hashentry < K, V > [] in a certain position of the segment array)
- ConcurrentHashMap JDK1.8 how to expand the capacity? tryPresize
- ConcurrentHashMap JDK1.8. What is the time to turn the linked list into a red black tree? Why is the critical value 8?
- ConcurrentHashMap JDK1.8 how to migrate data? transfer
Why is HashTable slow
The main reason why Hashtable is inefficient is that its implementation uses the synchronized keyword to lock put and other operations, while the synchronized keyword locking is to lock the whole object, that is, when modifying the Hash table such as put, it locks the whole Hash table, which makes its performance inefficient.
ConcurrentHashMap - JDK 1.7
In jdk1 In version 5 ~ 1.7, Java uses the segment lock mechanism to implement ConcurrentHashMap
In short, ConcurrentHashMap saves a Segment array in the object, that is, the whole hash table is divided into multiple segments; Each Segment element, that is, each Segment, is similar to a Hashtable; In this way, when performing the put operation, first locate the Segment to which the element belongs according to the hash algorithm, and then lock the Segment. Therefore, concurrent HashMap can realize multi-threaded put operation in multi-threaded concurrent programming. Next, analyze jdk1 Implementation principle of ConcurrentHashMap in version 7.
data structure
The entire ConcurrentHashMap is composed of segments, which represents the meaning of "part" or "paragraph", so it will be described as segment lock in many places. Note that in the text, I use "slot" to represent a segment in many places.
The simple understanding is that ConcurrentHashMap is an array of segments. Segments are locked by inheriting ReentrantLock, so each operation that needs to be locked locks a segment. In this way, as long as each segment is thread safe, the global thread safety is realized.
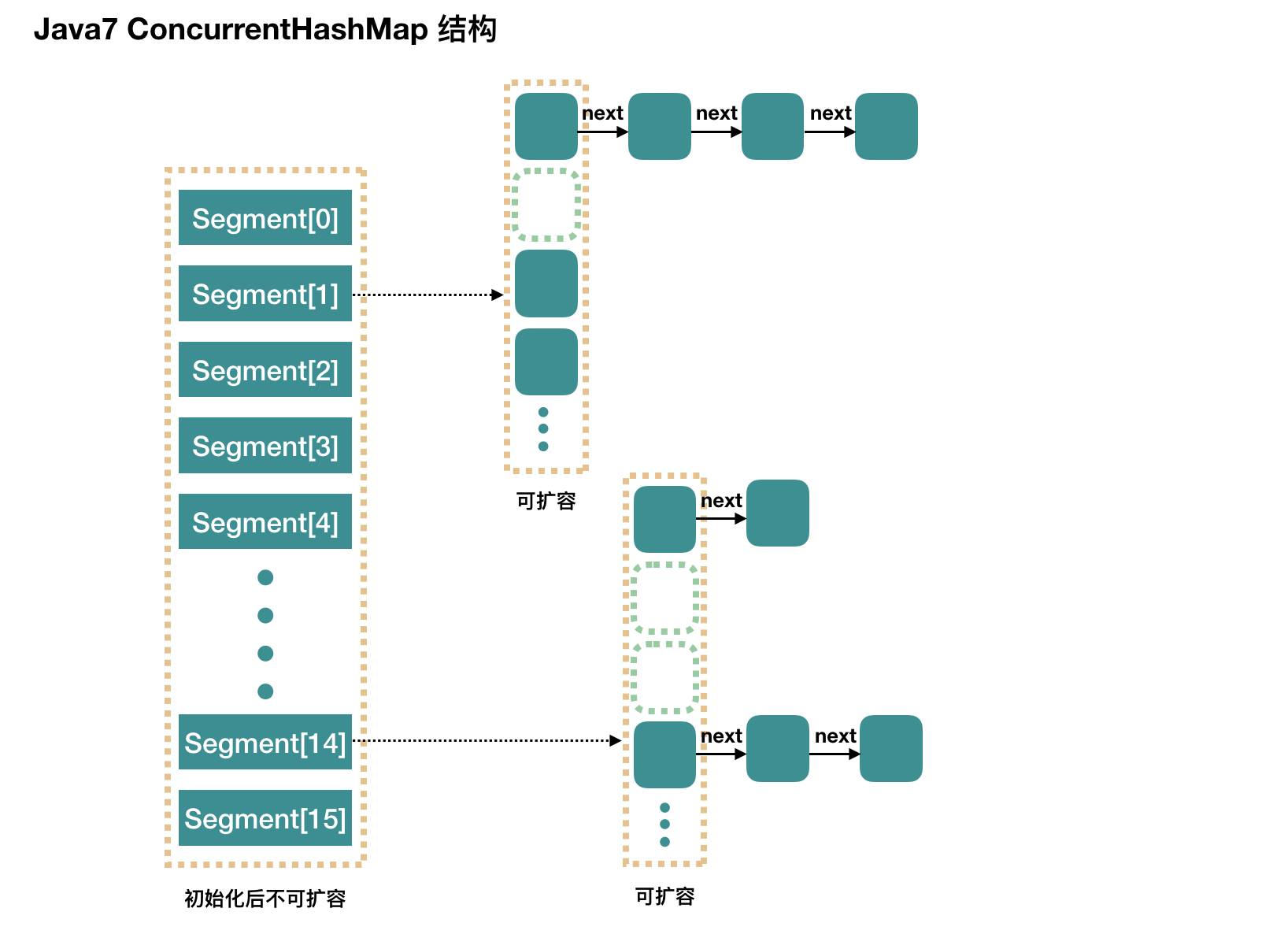
concurrencyLevel: parallelism level, concurrency number and Segment number. It doesn't matter how to translate it. Understand it. The default value is 16, which means that there are 16 Segments in ConcurrentHashMap. Therefore, theoretically, at this time, up to 16 threads can write concurrently, as long as their operations are distributed on different Segments. This value can be set to other values during initialization, but once initialized, it cannot be expanded.
In fact, each Segment is very similar to the HashMap introduced earlier, but it needs to ensure thread safety, so it needs to be handled more troublesome.
initialization
-
initialCapacity: initial capacity. This value refers to the initial capacity of the entire ConcurrentHashMap. It needs to be evenly distributed to each Segment during actual operation.
-
loadFactor: load factor. As we said before, the Segment array cannot be expanded, so this load factor is used internally for each Segment.
public ConcurrentHashMap(int initialCapacity,
float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS;
// Find power-of-two sizes best matching arguments
int sshift = 0;
int ssize = 1;
// Calculate the parallelism level ssize because you want to keep the parallelism level to the nth power of 2
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1;
}
// Let's not burn our brains here. Use the default value. concurrencyLevel is 16 and sshift is 4
// Then calculate that the segmentShift is 28 and the segmentMask is 15. These two values will be used later
this.segmentShift = 32 - sshift;
this.segmentMask = ssize - 1;
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
// initialCapacity sets the initial size of the entire map,
// Here, the size of each position in the Segment array can be calculated according to initialCapacity
// If the initialCapacity is 64, each Segment or "slot" can be divided into 4
int c = initialCapacity / ssize;
if (c * ssize < initialCapacity)
++c;
// Default min_ SEGMENT_ TABLE_ Capability is 2. This value is also important, because in this case, for a specific slot,
// Inserting one element does not result in capacity expansion, but only when inserting the second element
int cap = MIN_SEGMENT_TABLE_CAPACITY;
while (cap < c)
cap <<= 1;
// Create a Segment array,
// And create the first element of the array, segment[0]
Segment<K,V> s0 =
new Segment<K,V>(loadFactor, (int)(cap * loadFactor),
(HashEntry<K,V>[])new HashEntry[cap]);
Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize];
// Write segment[0] to the array
UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0]
this.segments = ss;
}
After initialization, we get a Segment array.
We will use the new ConcurrentHashMap() parameterless constructor for initialization. After initialization:
- The length of Segment array is 16 and cannot be expanded
- The default size of Segment[i] is 2, the load factor is 0.75, and the initial threshold is 1.5, that is, inserting the first element will not trigger capacity expansion, and inserting the second element will carry out the first capacity expansion
- segment[0] is initialized here, and other locations are still null. As for why segment[0] should be initialized, the following code will introduce it
- Currently, the value of segmentShift is 32 - 4 = 28 and the value of segmentMask is 16 - 1 = 15. Let's simply translate them into shift and mask, which will be used immediately
put process analysis
Let's first look at the main process of put. Some key details will be introduced in detail later.
public V put(K key, V value) {
Segment<K,V> s;
if (value == null)
throw new NullPointerException();
// 1. Calculate the hash value of the key
int hash = hash(key);
// 2. Find the position j in the Segment array according to the hash value
// hash is 32 bits, shift the segmentShift(28) bits to the right without sign, leaving the upper 4 bits,
// Then perform an and operation with segmentMask(15), that is, j is the upper 4 bits of the hash value, that is, the array subscript of the slot
int j = (hash >>> segmentShift) & segmentMask;
// As I just said, segment[0] is initialized during initialization, but other locations are still null,
// Ensuesegment (J) initializes segment[j]
if ((s = (Segment<K,V>)UNSAFE.getObject // nonvolatile; recheck
(segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment
s = ensureSegment(j);
// 3. Insert the new value into slot s
return s.put(key, hash, value, false);
}
According to the hash value, we can quickly find the corresponding Segment, and then the put operation inside the Segment.
Segment is internally composed of an array + linked list.
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
// Before writing to the segment, you need to obtain the exclusive lock of the segment
// Let's first look at the main process, which will be introduced in detail later
HashEntry<K,V> node = tryLock() ? null :
scanAndLockForPut(key, hash, value);
V oldValue;
try {
// This is an array inside segment
HashEntry<K,V>[] tab = table;
// Then use the hash value to find the array subscript that should be placed
int index = (tab.length - 1) & hash;
// first is the header of the linked list at this position of the array
HashEntry<K,V> first = entryAt(tab, index);
// Although the following string of for loops is very long, it is also easy to understand. Think about the two cases where there are no elements at this position and there is already a linked list
for (HashEntry<K,V> e = first;;) {
if (e != null) {
K k;
if ((k = e.key) == key ||
(e.hash == hash && key.equals(k))) {
oldValue = e.value;
if (!onlyIfAbsent) {
// Overwrite old value
e.value = value;
++modCount;
}
break;
}
// Continue to follow the linked list
e = e.next;
}
else {
// Whether the node is null or not depends on the process of obtaining the lock, but it has nothing to do with here.
// If it is not null, set it directly as the linked list header; If it is null, initialize and set it as the header of the linked list.
if (node != null)
node.setNext(first);
else
node = new HashEntry<K,V>(hash, key, value, first);
int c = count + 1;
// If the threshold of the segment is exceeded, the segment needs to be expanded
if (c > threshold && tab.length < MAXIMUM_CAPACITY)
rehash(node); // The expansion will also be analyzed in detail later
else
// If the threshold is not reached, put the node in the index position of the array tab,
// In fact, the new node is set as the header of the original linked list
setEntryAt(tab, index, node);
++modCount;
count = c;
oldValue = null;
break;
}
}
} finally {
// Unlock
unlock();
}
return oldValue;
}
The overall process is relatively simple. Due to the protection of exclusive lock, the internal operation of segment is not complicated. As for the concurrency problem, we will introduce it later.
Here, the put operation is over. Next, let's talk about some key operations.
Initialization slot: ensuesegment
During the initialization of ConcurrentHashMap, the first slot segment[0] will be initialized. For other slots, it will be initialized when the first value is inserted.
Concurrency needs to be considered here, because it is likely that multiple threads will come in at the same time to initialize the same slot segment[k], but as long as one succeeds
private Segment<K,V> ensureSegment(int k) {
final Segment<K,V>[] ss = this.segments;
long u = (k << SSHIFT) + SBASE; // raw offset
Segment<K,V> seg;
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) {
// Here we see why segment[0] should be initialized before,
// Initialize segment[k] with the array length and load factor at the current segment[0]
// Why use "current" because segment[0] may have been expanded long ago
Segment<K,V> proto = ss[0];
int cap = proto.table.length;
float lf = proto.loadFactor;
int threshold = (int)(cap * lf);
// Initializes the array inside segment[k]
HashEntry<K,V>[] tab = (HashEntry<K,V>[])new HashEntry[cap];
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u))
== null) { // Check again whether the slot is initialized by other threads.
Segment<K,V> s = new Segment<K,V>(lf, threshold, tab);
// Use the while loop and CAS internally. Exit after the current thread has successfully set the value or other threads have successfully set the value
while ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u))
== null) {
if (UNSAFE.compareAndSwapObject(ss, u, null, seg = s))
break;
}
}
}
return seg;
}
Generally speaking, ensuesegment (int k) is relatively simple. CAS is used to control concurrent operations.
Get write lock: scanAndLockForPut
As we saw earlier, when putting into a segment, we will first call node = tryLock()? Null: scanAndLockForPut (key, hash, value), that is to say, first conduct a tryLock() to quickly obtain the exclusive lock of the segment. If it fails, enter the scanAndLockForPut method to obtain the lock.
Now let's analyze how to control locking in this method.
private HashEntry<K,V> scanAndLockForPut(K key, int hash, V value) {
HashEntry<K,V> first = entryForHash(this, hash);
HashEntry<K,V> e = first;
HashEntry<K,V> node = null;
int retries = -1; // negative while locating node
// Cyclic lock acquisition
while (!tryLock()) {
HashEntry<K,V> f; // to recheck first below
if (retries < 0) {
if (e == null) {
if (node == null) // speculatively create node
// Here, it means that the linked list at this position of the array is empty without any elements
// Of course, another reason for entering here is that tryLock() fails, so there is concurrency in this slot, not necessarily in this location
node = new HashEntry<K,V>(hash, key, value, null);
retries = 0;
}
else if (key.equals(e.key))
retries = 0;
else
// Go down the list
e = e.next;
}
// If the number of retries exceeds max_ SCAN_ Restries (single core 1 multi-core 64), then do not rob, enter the blocking queue and wait for the lock
// lock() is a blocking method until it returns after obtaining the lock
else if (++retries > MAX_SCAN_RETRIES) {
lock();
break;
}
else if ((retries & 1) == 0 &&
// At this time, there is a big problem, that is, new elements enter the linked list and become a new header
// So the strategy here is to go through the scanAndLockForPut method again
(f = entryForHash(this, hash)) != first) {
e = first = f; // re-traverse if entry changed
retries = -1;
}
}
return node;
}
This method has two exits. One is that tryLock() succeeds and the loop terminates. The other is that the number of retries exceeds max_ SCAN_ Restries, go to the lock() method, which will block and wait until the exclusive lock is successfully obtained.
This method seems complicated, but it actually does one thing, that is to obtain the exclusive lock of the segment and instantiate the node if necessary.
Capacity expansion: rehash
Repeat, the segment array cannot be expanded. The expansion is to expand the capacity of the array hashentry < K, V > [] in a certain position of the segment array. After the expansion, the capacity is twice that of the original.
First of all, we need to review the place where the expansion is triggered. When putting, if it is judged that the insertion of the value will cause the number of elements of the segment to exceed the threshold, expand the capacity first and then interpolate. Readers can go back to the put method at this time.
This method does not need to consider concurrency, because when you get here, you hold the exclusive lock of the segment.
// The node on the method parameter is the data that needs to be added to the new array after this expansion.
private void rehash(HashEntry<K,V> node) {
HashEntry<K,V>[] oldTable = table;
int oldCapacity = oldTable.length;
// 2x
int newCapacity = oldCapacity << 1;
threshold = (int)(newCapacity * loadFactor);
// Create a new array
HashEntry<K,V>[] newTable =
(HashEntry<K,V>[]) new HashEntry[newCapacity];
// If the new mask is expanded from 16 to 32, the sizeMask is 31, corresponding to binary '000 00011111’
int sizeMask = newCapacity - 1;
// Traverse the original array and use the old routine to split the linked list at position i of the original array into two positions i and i+oldCap of the new array
for (int i = 0; i < oldCapacity ; i++) {
// e is the first element of the linked list
HashEntry<K,V> e = oldTable[i];
if (e != null) {
HashEntry<K,V> next = e.next;
// Calculate where it should be placed in the new array,
// Assuming that the length of the original array is 16 and e is at oldTable[3], idx can only be 3 or 3 + 16 = 19
int idx = e.hash & sizeMask;
if (next == null) // There is only one element in this position, which is easier to do
newTable[idx] = e;
else { // Reuse consecutive sequence at same slot
// e is the linked list header
HashEntry<K,V> lastRun = e;
// idx is the new location of the head node e of the current linked list
int lastIdx = idx;
// The following for loop will find a lastRun node, after which all elements will be put together
for (HashEntry<K,V> last = next;
last != null;
last = last.next) {
int k = last.hash & sizeMask;
if (k != lastIdx) {
lastIdx = k;
lastRun = last;
}
}
// Put the linked list composed of lastRun and all subsequent nodes in the position of lastIdx
newTable[lastIdx] = lastRun;
// The following operations are to process the nodes before lastRun,
// These nodes may be assigned to another linked list or to the above linked list
for (HashEntry<K,V> p = e; p != lastRun; p = p.next) {
V v = p.value;
int h = p.hash;
int k = h & sizeMask;
HashEntry<K,V> n = newTable[k];
newTable[k] = new HashEntry<K,V>(h, p.key, v, n);
}
}
}
}
// Put the new node in the head of one of the two linked lists in the new array
int nodeIndex = node.hash & sizeMask; // add the new node
node.setNext(newTable[nodeIndex]);
newTable[nodeIndex] = node;
table = newTable;
}
The expansion here is more complex than the previous HashMap, and the code is a little difficult to understand. There are two for loops next to each other. What's the use of the first for?
A closer look shows that it can work without the first for loop. However, if there are more nodes behind the lastRun after the for loop, it is worth it this time. Because we only need to clone the nodes in front of lastRun, and the following series of nodes follow lastRun without any operation.
I think Doug Lea's idea is also very interesting, but the worse case is that every lastRun is the last element or very late element of the linked list, so this traversal is a bit wasteful. However, Doug lea also said that according to statistics, if the default threshold is used, only about 1 / 6 of the nodes need to be cloned.
get process analysis
Compared with put, get is very simple.
- Calculate the hash value and find the specific position in the segment array, or the "slot" we used earlier
- The slot is also an array. Find the specific position in the array according to the hash
- Here is the linked list. Follow the linked list to find it
public V get(Object key) {
Segment<K,V> s; // manually integrate access methods to reduce overhead
HashEntry<K,V>[] tab;
// 1. hash value
int h = hash(key);
long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE;
// 2. Find the corresponding segment according to the hash
if ((s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)) != null &&
(tab = s.table) != null) {
// 3. Find the linked list at the corresponding position of the internal array of segment and traverse
for (HashEntry<K,V> e = (HashEntry<K,V>) UNSAFE.getObjectVolatile
(tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE);
e != null; e = e.next) {
K k;
if ((k = e.key) == key || (e.hash == h && key.equals(k)))
return e.value;
}
}
return null;
}
Concurrent problem analysis
Now that we have finished the put process and the get process, we can see that there is no lock in the get process, so naturally we need to consider the concurrency problem.
The operation put of adding a node and the operation remove of deleting a node need to add the exclusive lock on the segment, so there will be no problem between them. The problem we need to consider is that put or remove operations occur in the same segment during get.
- Thread safety of put operation.
- The initialization slot, which we mentioned earlier, uses CAS to initialize the array in the Segment.
- The operation of adding nodes to the linked list is inserted into the header. Therefore, if the get operation is in the middle of the process of traversing the linked list at this time, it will not be affected. Of course, another concurrency problem is that after put, the node just inserted into the header needs to be read. This depends on the unsafe method used in setEntryAt method putOrderedObject.
- Expansion. Capacity expansion is to create a new array, then migrate the data, and finally set the newTable to the attribute table. Therefore, if the get operation is also in progress at this time, it doesn't matter. If get goes first, it is to query the old table; If put comes first, the visibility guarantee of put operation is that table uses volatile keyword.
- Thread safety of the remove operation.
- We didn't analyze the source code for the remove operation, so the readers who are interested here still need to be realistic in the source code.
- The get operation needs to traverse the linked list, but the remove operation will "destroy" the linked list.
- If the get operation of the node destroyed by remove has passed, there is no problem here.
- If remove destroys a node first, consider two cases. 1. If this node is the head node, you need to set the next of the head node to the element at this position of the array. Although table is decorated with volatile, volatile does not provide visibility assurance for the internal operation of the array. Therefore, UNSAFE is used in the source code to operate the array. See the method setEntryAt. 2. If the node to be deleted is not the head node, it will connect the successor node of the node to be deleted to the predecessor node. The concurrency guarantee here is that the next attribute is volatile.
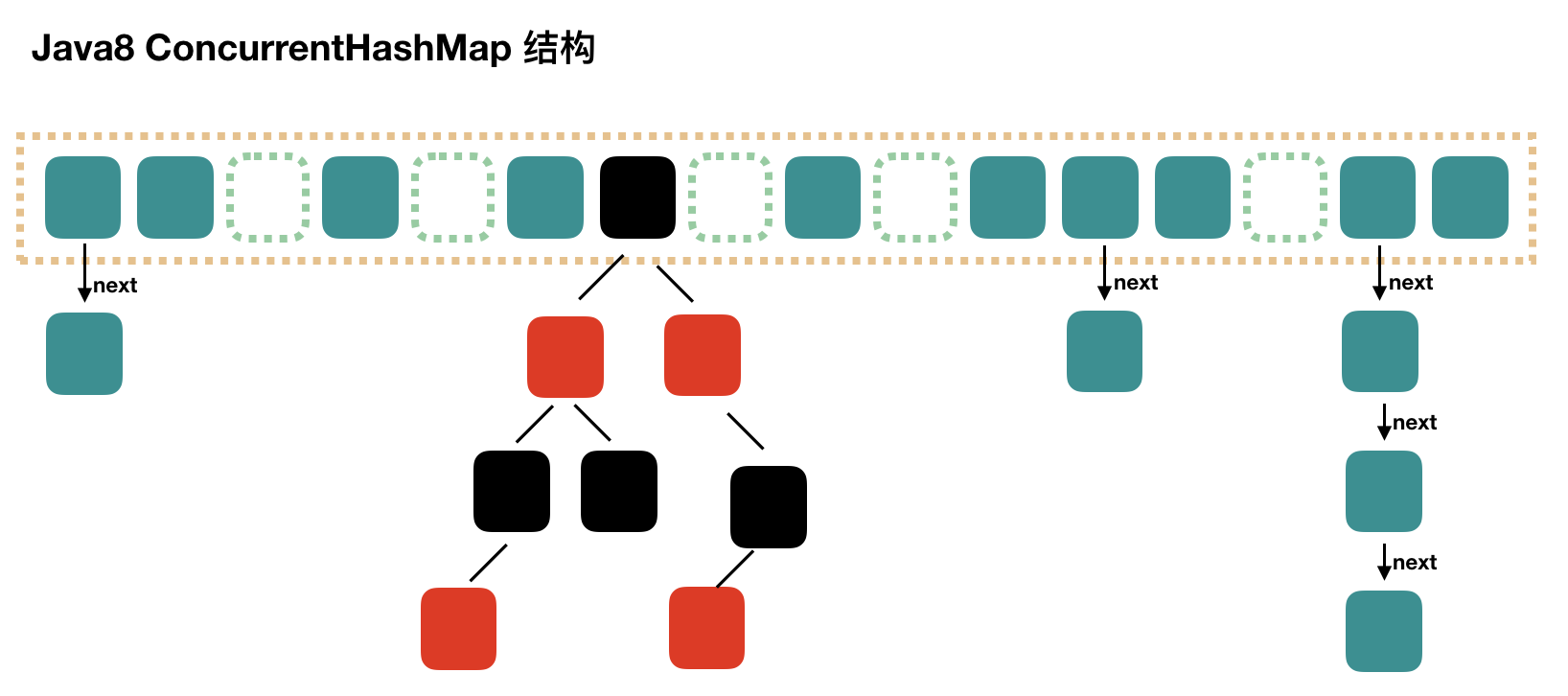
ConcurrentHashMap - JDK 1.8
In jdk1 Before 7, ConcurrentHashMap was implemented through the Segment lock mechanism, so its maximum concurrency is limited by the number of segments. Therefore, in jdk1 In 8, the implementation principle of ConcurrentHashMap abandons this design, but selects the way of array + linked list + red black tree similar to HashMap, while CAS and synchronized are used for locking.
Data structure
The structure is basically the same as the HashMap of Java 8, but it needs to ensure thread safety, so it really needs to be more complex in the source code.
initialization
// There's nothing to do here
public ConcurrentHashMap() {
}
public ConcurrentHashMap(int initialCapacity) {
if (initialCapacity < 0)
throw new IllegalArgumentException();
int cap = ((initialCapacity >= (MAXIMUM_CAPACITY >>> 1)) ?
MAXIMUM_CAPACITY :
tableSizeFor(initialCapacity + (initialCapacity >>> 1) + 1));
this.sizeCtl = cap;
}
This initialization method is interesting. By providing the initial capacity, sizeCtl is calculated. sizeCtl = [(1.5 * initialCapacity + 1), and then take the nearest n-th power of 2 upward]. If the initialCapacity is 10, the sizeCtl is 16. If the initialCapacity is 11, the sizeCtl is 32.
sizeCtl is used in many scenarios, but as long as you follow the idea of the article, you won't be confused by it.
put process analysis
public V put(K key, V value) {
return putVal(key, value, false);
}
final V putVal(K key, V value, boolean onlyIfAbsent) {
if (key == null || value == null) throw new NullPointerException();
// Get hash value
int hash = spread(key.hashCode());
// Used to record the length of the corresponding linked list
int binCount = 0;
for (Node<K,V>[] tab = table;;) {
Node<K,V> f; int n, i, fh;
// If the array is empty, initialize the array
if (tab == null || (n = tab.length) == 0)
// Initialize the array, which will be described in detail later
tab = initTable();
// Find the array subscript corresponding to the hash value to get the first node f
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
// If the array is empty,
// Use a CAS operation to put the new value into it. The put operation is almost over and can be pulled to the last side
// If CAS fails, there are concurrent operations. Just go to the next cycle
if (casTabAt(tab, i, null,
new Node<K,V>(hash, key, value, null)))
break; // no lock when adding to empty bin
}
// hash can be equal to MOVED, which can only be seen later, but you can guess from the name. It must be because of capacity expansion
else if ((fh = f.hash) == MOVED)
// Help with data migration. It's easy to understand this after reading the introduction of data migration
tab = helpTransfer(tab, f);
else { // That is to say, f is the head node of this position and is not empty
V oldVal = null;
// Gets the monitor lock of the head node of the array at this position
synchronized (f) {
if (tabAt(tab, i) == f) {
if (fh >= 0) { // The hash value of the header node is greater than 0, indicating that it is a linked list
// Used to accumulate and record the length of the linked list
binCount = 1;
// Traversal linked list
for (Node<K,V> e = f;; ++binCount) {
K ek;
// If an "equal" key is found, judge whether to overwrite the value, and then you can break
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
// At the end of the linked list, put the new value at the end of the linked list
Node<K,V> pred = e;
if ((e = e.next) == null) {
pred.next = new Node<K,V>(hash, key,
value, null);
break;
}
}
}
else if (f instanceof TreeBin) { // Red black tree
Node<K,V> p;
binCount = 2;
// Call the interpolation method of red black tree to insert a new node
if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) {
// To judge whether to convert the linked list into a red black tree, the critical value is the same as HashMap, which is 8
if (binCount >= TREEIFY_THRESHOLD)
// This method is slightly different from that in HashMap, that is, it does not necessarily carry out red black tree conversion,
// If the length of the current array is less than 64, you will choose to expand the array instead of converting it to a red black tree
// We won't look at the specific source code. We'll talk about it later in the expansion part
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
//
addCount(1L, binCount);
return null;
}
Initialization array: initTable
This is relatively simple. It mainly initializes an array of appropriate size, and then sets sizeCtl.
The concurrency problem in the initialization method is controlled by performing a CAS operation on sizeCtl.
private final Node<K,V>[] initTable() {
Node<K,V>[] tab; int sc;
while ((tab = table) == null || tab.length == 0) {
// The "credit" of initialization was "robbed" by other threads
if ((sc = sizeCtl) < 0)
Thread.yield(); // lost initialization race; just spin
// CAS, set sizeCtl to - 1, which means the lock has been robbed
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
try {
if ((tab = table) == null || tab.length == 0) {
// DEFAULT_ The default initial capacity of capability is 16
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
// Initialize the array with a length of 16 or the length provided during initialization
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
// Assign this array to table, which is volatile
table = tab = nt;
// If n is 16, then sc = 12
// It's actually 0.75 * n
sc = n - (n >>> 2);
}
} finally {
// Set sizeCtl to sc, let's take it as 12
sizeCtl = sc;
}
break;
}
}
return tab;
}
Linked list to red black tree: treeifyBin
We also said in the put source code analysis earlier that treeifyBin does not necessarily carry out red black tree conversion, or it may only do array expansion. Let's do source code analysis.
private final void treeifyBin(Node<K,V>[] tab, int index) {
Node<K,V> b; int n, sc;
if (tab != null) {
// MIN_ TREEIFY_ Capability is 64
// Therefore, if the array length is less than 64, that is, 32 or 16 or less, the array capacity will be expanded
if ((n = tab.length) < MIN_TREEIFY_CAPACITY)
// We will analyze this method in detail later
tryPresize(n << 1);
// b is the head node
else if ((b = tabAt(tab, index)) != null && b.hash >= 0) {
// Lock
synchronized (b) {
if (tabAt(tab, index) == b) {
// The following is to traverse the linked list and establish a red black tree
TreeNode<K,V> hd = null, tl = null;
for (Node<K,V> e = b; e != null; e = e.next) {
TreeNode<K,V> p =
new TreeNode<K,V>(e.hash, e.key, e.val,
null, null);
if ((p.prev = tl) == null)
hd = p;
else
tl.next = p;
tl = p;
}
// Set the red black tree to the corresponding position of the array
setTabAt(tab, index, new TreeBin<K,V>(hd));
}
}
}
}
}
Capacity expansion: tryprevize
If the source code of java8 concurrent HashMap is not simple, it means capacity expansion and migration.
To fully understand this method, you also need to look at the subsequent transfer method. Readers should know this in advance.
The capacity expansion here is also doubled. After the expansion, the array capacity is twice that of the original.
// First of all, the method parameter size has doubled when it is passed in
private final void tryPresize(int size) {
// c: 1.5 times the size, plus 1, and then take the nearest 2 to the nth power.
int c = (size >= (MAXIMUM_CAPACITY >>> 1)) ? MAXIMUM_CAPACITY :
tableSizeFor(size + (size >>> 1) + 1);
int sc;
while ((sc = sizeCtl) >= 0) {
Node<K,V>[] tab = table; int n;
// This if branch is basically the same as the code for initializing the array mentioned earlier. Here, we can ignore this code
if (tab == null || (n = tab.length) == 0) {
n = (sc > c) ? sc : c;
if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
try {
if (table == tab) {
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
table = nt;
sc = n - (n >>> 2); // 0.75 * n
}
} finally {
sizeCtl = sc;
}
}
}
else if (c <= sc || n >= MAXIMUM_CAPACITY)
break;
else if (tab == table) {
// I don't understand what rs really means, but it doesn't matter
int rs = resizeStamp(n);
if (sc < 0) {
Node<K,V>[] nt;
if ((sc >>> RESIZE_STAMP_SHIFT) != rs || sc == rs + 1 ||
sc == rs + MAX_RESIZERS || (nt = nextTable) == null ||
transferIndex <= 0)
break;
// 2. Use CAS to add 1 to sizeCtl, and then execute the transfer method
// nextTab is not null at this time
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1))
transfer(tab, nt);
}
// 1. Set sizeCtl to (RS < < resize_stamp_shift) + 2)
// I don't understand what this value really means? However, it can be calculated that the result is a relatively large negative number
// Call the transfer method, and the nextTab parameter is null
else if (U.compareAndSwapInt(this, SIZECTL, sc,
(rs << RESIZE_STAMP_SHIFT) + 2))
transfer(tab, null);
}
}
}
The core of this method is the operation of sizecl value. First set it to a negative number, then execute transfer(tab, null), and then add sizecl by 1 and execute transfer(tab, nt) in the next cycle. Then, you may continue to add sizecl by 1 and execute transfer(tab, nt).
Therefore, the possible operation is to execute transfer(tab, null) + multiple transfers (tab, NT). How to end the cycle here needs to read the transfer source code.
Data migration: transfer
The following method is a little long. Migrate the elements of the original tab array to the new nextTab array.
Although the multiple calls of transfer in the tryprevize method we mentioned before do not involve multithreading, this transfer method can be called in other places. Typically, we said when we talked about the put method before. Please look up to see if there is a place where the helpTransfer method is called, and the helpTransfer method will call the transfer method.
This method supports multi-threaded execution. When the peripheral calls this method, it will ensure that the nextTab parameter of the first thread initiating data migration is null. When this method is called later, nextTab will not be null.
Before reading the source code, we must understand the mechanism of concurrent operation. The length of the original array is n, so we have n migration tasks. It is easiest for each thread to be responsible for one small task at a time. After each task is completed, we can detect whether there are other unfinished tasks to help with the migration. Doug Lea uses a string. The simple solution is the step size. Each thread is responsible for migrating part of it every time, For example, 16 small tasks are migrated each time. Therefore, we need a global scheduler to arrange which thread performs which tasks. This is the function of the property transferIndex.
The first thread initiating data migration will point the transferIndex to the last position of the original array, then the backward and forward stripe tasks belong to the first thread, then point the transferIndex to the new position, and the forward stripe tasks belong to the second thread, and so on. Of course, the second thread mentioned here does not really refer to the second thread, but can also be the same thread. This reader should be able to understand it. In fact, a large migration task is divided into task packages
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
int n = tab.length, stride;
// Stripe is directly equal to N in single core mode and (n > > > 3) / ncpu in multi-core mode. The minimum value is 16
// Stripe can be understood as "step size". There are n locations that need to be migrated,
// Divide these n tasks into multiple task packages, and each task package has stripe tasks
if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE)
stride = MIN_TRANSFER_STRIDE; // subdivide range
// If nextTab is null, initialize it first
// As we said earlier, the periphery will ensure that the parameter nextTab is null when the first thread initiating migration calls this method
// When the thread participating in the migration calls this method later, nextTab will not be null
if (nextTab == null) {
try {
// Capacity doubled
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n << 1];
nextTab = nt;
} catch (Throwable ex) { // try to cope with OOME
sizeCtl = Integer.MAX_VALUE;
return;
}
// nextTable is an attribute in ConcurrentHashMap
nextTable = nextTab;
// transferIndex is also an attribute of ConcurrentHashMap, which is used to control the location of migration
transferIndex = n;
}
int nextn = nextTab.length;
// ForwardingNode is translated as the Node being migrated
// This construction method will generate a Node. The key, value and next are null. The key is that the hash is MOVED
// We will see later that after the node at position i in the original array completes the migration,
// The ForwardingNode will be set at location i to tell other threads that the location has been processed
// So it's actually a sign.
ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab);
// advance means that you are ready to move to the next location after completing the migration of one location
boolean advance = true;
boolean finishing = false; // to ensure sweep before committing nextTab
/*
* The following for loop is the most difficult to understand in the front. To understand them, you should first understand the back, and then look back
*
*/
// i is the location index, and bound is the boundary. Note that it is from back to front
for (int i = 0, bound = 0;;) {
Node<K,V> f; int fh;
// The following while is really hard to understand
// If advance is true, it means that the next location can be migrated
// Simply understand the ending: i points to transferIndex, and bound points to transferIndex stripe
while (advance) {
int nextIndex, nextBound;
if (--i >= bound || finishing)
advance = false;
// Assign the transferIndex value to nextIndex
// Here, once the transferIndex is less than or equal to 0, it means that there are corresponding threads to process all positions of the original array
else if ((nextIndex = transferIndex) <= 0) {
i = -1;
advance = false;
}
else if (U.compareAndSwapInt
(this, TRANSFERINDEX, nextIndex,
nextBound = (nextIndex > stride ?
nextIndex - stride : 0))) {
// Look at the code in parentheses. nextBound is the boundary of this migration task. Note that it is from back to front
bound = nextBound;
i = nextIndex - 1;
advance = false;
}
}
if (i < 0 || i >= n || i + n >= nextn) {
int sc;
if (finishing) {
// All migration operations have been completed
nextTable = null;
// Assign the new nextTab to the table attribute to complete the migration
table = nextTab;
// Recalculate sizeCtl: n is the length of the original array, so the value obtained by sizeCtl will be 0.75 times the length of the new array
sizeCtl = (n << 1) - (n >>> 1);
return;
}
// As we said before, sizeCtl will be set to (RS < < resize_stamp_shift) + 2 before migration
// Then, for each thread participating in the migration, sizeCtl will be increased by 1,
// Here, the CAS operation is used to subtract 1 from sizeCtl, which means that you have completed your own task
if (U.compareAndSwapInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {
// The task ends and the method exits
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)
return;
// Here, the description (SC - 2) = = resizestamp (n) < < resize_ STAMP_ SHIFT,
// In other words, after all the migration tasks are completed, it will enter the if(finishing) {} branch above
finishing = advance = true;
i = n; // recheck before commit
}
}
// If the location i is empty and there is no node, the "ForwardingNode" empty node just initialized will be placed“
else if ((f = tabAt(tab, i)) == null)
advance = casTabAt(tab, i, null, fwd);
// This location is a ForwardingNode, which indicates that the location has been migrated
else if ((fh = f.hash) == MOVED)
advance = true; // already processed
else {
// Lock the node at this position of the array and start processing the migration at this position of the array
synchronized (f) {
if (tabAt(tab, i) == f) {
Node<K,V> ln, hn;
// If the hash of the head Node is greater than 0, it indicates that it is the Node node of the linked list
if (fh >= 0) {
// The following is similar to the concurrent HashMap migration in Java 7,
// You need to divide the linked list into two,
// Find the lastRun in the original linked list, and then migrate the lastRun and its subsequent nodes together
// Nodes before lastRun need to be cloned and then divided into two linked lists
int runBit = fh & n;
Node<K,V> lastRun = f;
for (Node<K,V> p = f.next; p != null; p = p.next) {
int b = p.hash & n;
if (b != runBit) {
runBit = b;
lastRun = p;
}
}
if (runBit == 0) {
ln = lastRun;
hn = null;
}
else {
hn = lastRun;
ln = null;
}
for (Node<K,V> p = f; p != lastRun; p = p.next) {
int ph = p.hash; K pk = p.key; V pv = p.val;
if ((ph & n) == 0)
ln = new Node<K,V>(ph, pk, pv, ln);
else
hn = new Node<K,V>(ph, pk, pv, hn);
}
// One of the linked lists is placed in the position i of the new array
setTabAt(nextTab, i, ln);
// Another linked list is placed in the position i+n of the new array
setTabAt(nextTab, i + n, hn);
// Set the position of the original array to fwd, which means that the position has been processed,
// Once other threads see that the hash value of this location is MOVED, they will not migrate
setTabAt(tab, i, fwd);
// If advance is set to true, it means that the location has been migrated
advance = true;
}
else if (f instanceof TreeBin) {
// Migration of red and black trees
TreeBin<K,V> t = (TreeBin<K,V>)f;
TreeNode<K,V> lo = null, loTail = null;
TreeNode<K,V> hi = null, hiTail = null;
int lc = 0, hc = 0;
for (Node<K,V> e = t.first; e != null; e = e.next) {
int h = e.hash;
TreeNode<K,V> p = new TreeNode<K,V>
(h, e.key, e.val, null, null);
if ((h & n) == 0) {
if ((p.prev = loTail) == null)
lo = p;
else
loTail.next = p;
loTail = p;
++lc;
}
else {
if ((p.prev = hiTail) == null)
hi = p;
else
hiTail.next = p;
hiTail = p;
++hc;
}
}
// If the number of nodes is less than 8 after one is divided into two, the red black tree will be converted back to the linked list
ln = (lc <= UNTREEIFY_THRESHOLD) ? untreeify(lo) :
(hc != 0) ? new TreeBin<K,V>(lo) : t;
hn = (hc <= UNTREEIFY_THRESHOLD) ? untreeify(hi) :
(lc != 0) ? new TreeBin<K,V>(hi) : t;
// Place ln in the position i of the new array
setTabAt(nextTab, i, ln);
// Place hn in the new array position i+n
setTabAt(nextTab, i + n, hn);
// Set the position of the original array to fwd, which means that the position has been processed,
// Once other threads see that the hash value of this location is MOVED, they will not migrate
setTabAt(tab, i, fwd);
// If advance is set to true, it means that the location has been migrated
advance = true;
}
}
}
}
}
}
In the final analysis, the transfer method does not realize all the migration tasks. Each time this method is called, it only realizes the migration of the transferIndex to the first stripe, and the rest needs to be controlled by the periphery.
At this time, it may be clearer to go back and take a closer look at the tryprevize method.
get process analysis
The get method is always the simplest, and here is no exception:
- Calculate hash value
- Find the corresponding position of the array according to the hash value: (n - 1) & H
- Search according to the properties of the node at this location
- If the location is null, you can return null directly
- If the node at this location is exactly what we need, return the value of this node
- If the hash value of the node at this location is less than 0, it indicates that the capacity is being expanded, or it is a red black tree. We will introduce the find method later
- If the above three items are not satisfied, it is the linked list, which can be traversed and compared
public V get(Object key) {
Node<K,V>[] tab; Node<K,V> e, p; int n, eh; K ek;
int h = spread(key.hashCode());
if ((tab = table) != null && (n = tab.length) > 0 &&
(e = tabAt(tab, (n - 1) & h)) != null) {
// Determine whether the head node is the node we need
if ((eh = e.hash) == h) {
if ((ek = e.key) == key || (ek != null && key.equals(ek)))
return e.val;
}
// If the hash of the head node is less than 0, it indicates that the capacity is being expanded, or the location is a red black tree
else if (eh < 0)
// Refer to forwardingnode Find (int h, object K) and treebin find(int h, Object k)
return (p = e.find(h, key)) != null ? p.val : null;
// Traversal linked list
while ((e = e.next) != null) {
if (e.hash == h &&
((ek = e.key) == key || (ek != null && key.equals(ek))))
return e.val;
}
}
return null;
}
To put it simply, most of the contents of this method are very simple. Only when the capacity expansion happens, forwardingnode Find (int h, object K) is a little more complicated, but after understanding the process of data migration, it is not difficult, so it will not be discussed here due to space limitations.
Comparative summary
- HashTable: the synchronized keyword is used to lock put and other operations;
- ConcurrentHashMap JDK1.7: Using segment lock mechanism;
- ConcurrentHashMap JDK1.8: Array + linked list + red black tree data structure and CAS atomic operation are used;