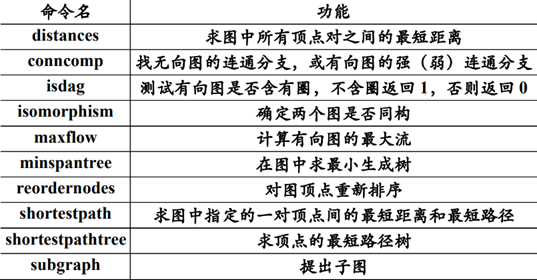
G = graph(s,t,weights) -- use node pair group s,t and weight vector weights
Create weighted undirected graph
G = graph(s,t,weights,nodes) -- use character vector cell array nodes
Specify node name
G = graph(s,t,weights,num) -- use the numerical scalar num to specify the value in the graph
Number of nodes
G = graph(A[,nodes],type) - constructed using only the upper or lower triangular matrix of A
Weighting graph, type can be 'upper' or
'lower'
sparse adjacency matrix to coefficient matrix
Example 1 undirected graph
clc, clear, close all
E=[1,2;1,3;2,3;3,2;3,5;4,2;4,6;5,2;5,4;6,5]
s = E(:,1); t = E(:,2);
nodes =cellstr(strcat('v',int2str([1:6]')))
G = digraph(s, t, [], nodes);
plot(G)
W1 = adjacency(G) %Coefficient matrix of adjacency matrix
W2 = incidence(G)%Coefficient matrix of incidence matrix
Clear all: clear all variables, functions, MEX files and strcat in the workspace
cellstr
The adjacency matrix represents the relationship between nodes, and the incidence matrix represents the relationship between nodes and edges
Example 2 shortest path of weighted undirected graph
clc, clear, close all E = [1,2,50; 1,4,40; 1,5,25; 1,6,10; 2,3,15; 2,4,20; 2,6,25; 3,4,10;3,5,20; 4,5,10; 4,6,25; 5,6,55]; G = graph(E(:,1), E(:,2), E(:,3)); p = plot(G,'EdgeLabel',G.Edges.Weight,'Layout', 'circle'); [path2, d2] = shortestpath(G, 1, 2) %Find the shortest path from 1 to 2 highlight(p,path2,'EdgeColor','r','LineWidth',1.5)%Draw in the picture path2 Route [path3, d3] = shortestpath(G, 1, 3, 'method','positive') %ditto,'method','positive'Can be omitted highlight(p,path3,'EdgeColor', 'm','LineWidth',1.5)
Another example
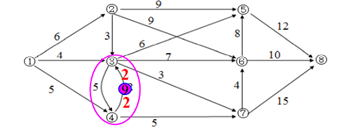
clc, clear, close all a(1,2)=2;a(1,3)=8;a(1,4)=1;a(2,3)=6;a(2,5)=1; a(3,4)=7;a(3,5)=5;a(3,6)=1;a(3,7)=2;a(4,7)=9; a(5,6)=3;a(5,8)=2;a(5,9)=9;a(6,7)=4;a(6,9)=6; a(7,9)=3;a(7,10)=1;a(8,9)=7;a(8,11)=9; a(9,10)=1;a(9,11)=2;a(10,11)=4; a=a'; [i,j,v]=find(a); b=sparse(i,j,v,11,11); [x,y,z]=graphshortestpath(b,1,11,'directed',false)
Where z represents the penultimate node from 1 (set in graphsorestpath, not the default) to the shortest path of each point, for example, z3=6, and the shortest path from 1 to 3 is from 1 to 2 to 5 to 6 and then to 3
It can be seen from the two examples that the shortestpath is used for the generated graph and the graphshortestpath is used for the sparse matrix. The graphmaxflow and maxflow in Example 7 below are the same
Example 3 Dijkstra
clc, clear, a=zeros(6); a(1,[2,4,5,6])=[50,40,25,10]; a(2,[3,4,6])=[15,20,25]; a(3,[4,5])=[10,20]; a(4,[5,6])=[10,25]; a(5,6)=55; G = graph(a,'upper'); d = distances(G,'Method','positive')
Example 4 Prime to find the minimum spanning tree (it seems that it can't be used)
a=zeros(7);
a(1,2)=50; a(1,3)=60; a(2,4)=65; a(2,5)=40; a(3,4)=52;
a(3,7)=45; a(4,5)=50; a(4,6)=30;a(4,7)=42; a(5,6)=70;
a=a+a';
a(find(a==0))=inf;
result=[];p=1;tb=2:length(a);
while size(result,2)~=length(a)-1
temp=a(p,tb);
temp=temp(:);
d=min(temp);
[jb,kb]=find(a(p,tb)==d,1);
j=p(jb);k=tb(kb);
result=[result,[j;k;d]];p=[p,k];tb(find(tb==k))=[];
end
result
Example 5 Kruskal finds the minimum spanning tree (it seems that it can't be used)
a(1,2)=50; a(1,3)=60; a(2,4)=65; a(2,5)=40;a(3,4)=52;a(3,7)=45;
a(4,5)=50; a(4,6)=30;a(4,7)=42; a(5,6)=70;
[i,j,b]=find(a);data=[i';j';b'];index=data(1:2,:);
loop=length(a)-1;result=[];
while length(result)<loop
temp=min(data(3,:));
flag=find(data(3,:)==temp);
flag=flag(1);
v1=index(1,flag);
v2=index(2,flag);
if v1~=v2
result=[result,data(:,flag)];
end
index(find(index==v2))=v1;
data(:,flag)=[];index(:,flag)=[];
end
result
Example 6 minimum spanning tree function
clc, clear, close all, a=zeros(7);
a(1,[2 3])=[50,60];a(3,[4,7])=[52,45];
a(2,[4 5])=[65 40]; a(4,[5:7])=[50,30,42];
a(5,6)=70;
s=cellstr(strcat('v',int2str([1:7]')));
G=graph(a,s,'upper');
p=plot(G,'EdgeLabel',G.Edges.Weight)
T=minspantree(G,'Method','sparse')
L=sum(T.Edges.Weight), highlight(p,T)
sum is the weight of the minimum spanning tree, which is often used to connect each point and calculate the minimum weight. Upper indicates that the input matrix is the upper triangle, and vice versa
Another example
clc, clear, xy=load('data4_12.txt'); d=mandist(xy); %seek xy Absolute value distance between two columns of vectors
s=cellstr(strcat('v',int2str([1:9]'))); %Construct vertex string
G=graph(d,s); %Structural undirected graph
T=minspantree(G); %Use default Prim Algorithm for minimum spanning tree
L=sum(T.Edges.Weight) %Calculate the weight of the minimum spanning tree T.Edges %Displays the edge set of the minimum spanning tree h=plot(G,'Layout','circle','NodeFontSize',12); %Draw an undirected graph
highlight(h,T,'EdgeColor','r','LineWidth',2) %Thicken the edges of the minimum spanning tree
Example 7 find the maximum flow and label
clc, clear, close all a = zeros(6); a(1,[2,4])=[8,7]; a(2,[3,4])=[9,5]; a(3,[4,6])=[2,5]; a(4,5)=9; a(5,[3,6])=[6,10]; G = digraph(a); H=plot(G,'EdgeLabel',G.Edges.Weight); [M,F]=maxflow(G,1,6) F.Edges, highlight(H,F, 'EdgeColor','r','LineWidth',1.5)
The command graphmaxflow of Matlab Graph Theory toolbox to solve the maximum flow can only solve the problem that the weights are positive and there can be no two arcs between two vertices. If there are two vertices, you can add a virtual vertex. For example, add a virtual vertex 9 between vertex 4 and vertex 3, and add two arcs. Delete the arc with the weight of 2 from vertex 4 to vertex 3. The capacity of both arcs is 2, not 1, because this is the capacity. This one needs the capacity of 2, not the distance.
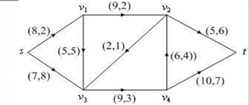
The minimum cost maximum flow problem requires a maximum flow from the sending point s to the receiving point t, so that the sum of the total transportation cost bf of the flow is the minimum
function [flow,val]=mincostmaxflow(rongliang,cost,flowvalue);
%Minimum cost maximum flow function
%The first parameter: capacity matrix; The second parameter: cost matrix;
%The first two parameters must be disposed of as zero in the non path
%The third parameter: specify the capacity value (can not be written, which means to find the minimum cost and maximum flow)
%The return value flow is the feasible flow matrix, and val is the minimum cost value
Example 8 finding the maximum flow and minimum cost
global M num
c=zeros(6);u=zeros(6);
c(1,2)=2;c(1,4)=8;c(2,3)=2;c(2,4)=5;
c(3,4)=1;c(3,6)=6;c(4,5)=3;c(5,3)=4;c(5,6)=7;
u(1,2)=8;u(1,4)=7;u(2,3)=9;u(2,4)=5;
u(3,4)=2;u(3,6)=5;u(4,5)=9;u(5,3)=6;u(5,6)=10;
num=size(u,1);M=sum(sum(u))*num^2;
[f,val]=mincostmaxflow(u,c)
Two external functions need to be added
firstly
function path=floydpath(w)
global M num
w=w+((w==0)-eye(num))*M;
p=zeros(num);
for k=1:num
for i=1:num
for j=1:num
if w(i,j)>w(i,k)+w(k,j)
w(i,j)=w(i,k)+w(k,j);
p(i,j)=k;
end
end
end
end
if w(1,num)==M
path=[];
else
path=zeros(num);
s=1;
t=num; m=p(s,t);
while ~isempty(m)
if m(1)
s=[s,m(1)];t=[t,t(1)];t(1)=m(1);
m(1)=[];
m=[p(s(1),t(1)),m,p(s(end),t(end))];
else
path(s(1),t(1))=1;s(1)=[];m(1)=[];t(1)=[];
end
end
end
second
function [flow,val]=mincostmaxflow(rongliang,cost,flowvalue);
global M
flow=zeros(size(rongliang));
allflow=sum(flow(1,:));
if nargin<3
flowvalue=M;
end
while allflow<flowvalue
w=(flow<rongliang).*cost-((flow>0).*cost)';
path=floydpath(w);
if isempty(path)
val=sum(sum(flow.*cost));
return;
end
theta=min(min(path.*(rongliang-flow)+(path.*(rongliang-flow)==0).*M));
theta=min([min(path'.*flow+(path'.*flow==0).*M),theta]);
flow=flow+(rongliang>0).*(path-path').*theta;
allflow=sum(flow(1,:));
end
val=sum(sum(flow.*cost));
For two new functions, click the above run (F9 doesn't seem to work), automatically name them "function name. m", select "add to path", run them separately, and you will be prompted that the input parameters are insufficient, and then run the main file
Common functions
Traveling salesman problem: in graph theory terms, it is to find a Hamilton ian cycle with minimum weight in a weighted complete graph (each pair of different vertices is connected by exactly one edge). This kind of circle is called the optimal circle. At present, the better algorithm is to select two points vi and vj from the obtained circle each time, and compare v(i)v(j)+v(i+1)v(j+1) and v(i)v(i+1)+v(j)v(j+1) for iteration
Example 9 travel agent
clc, clear, close all
global a
a=zeros(6);
a(1,2)=56;a(1,3)=35;a(1,4)=21;a(1,5)=51;a(1,6)=60;
a(2,3)=21;a(2,4)=57;a(2,5)=78;a(2,6)=70; a(3,4)=36;
a(3,5)=68;a(3,6)=68; a(4,5)=51;a(4,6)=61;a(5,6)=13;
a=a+a';L=size(a,1); %Returns the number of rows of the matrix, and 2 is the number of columns
c1=[5 1:4 6 ]; %5/1: 4/6
[circle,long]=modifycircle(c1,L); %
c2=[5 6 1:4 ]; %By changing the initial circle, the last vertex of the algorithm is fixed
[circle2,long2]=modifycircle(c2,L);
if long2<long
long=long2;
circle=circle2;
end
circle,long
External function
function [circle,long]=modifycircle(c1,L);
global a
flag=1;
while flag>0
flag=0;
for m=1:L-3
for n=m+2:L-1
if a(c1(m),c1(n))+a(c1(m+1),c1(n+1))<a(c1(m),c1(m+1))+a(c1(n),c1(n+1))
flag=1;
c1(m+1:n)=c1(n:-1:m+1);
end
end
end
end
long=a(c1(1),c1(L));
for i=1:L-1
long=long+a(c1(i),c1(i+1));
end
circle=c1;
If the solution of graph theory is not used, linear 0-1 programming can also be used
Example 10 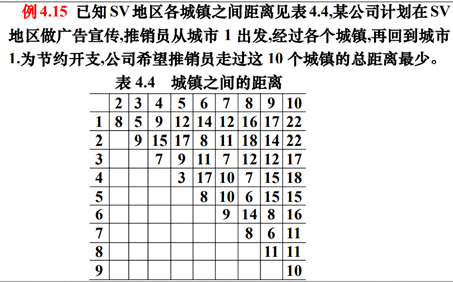
clc, clear
a=readmatrix('data4_15.xlsx');
a(isnan(a))=0; %hold NaN Replace with 0
b=zeros(10); %Adjacency matrix initialization
b([1:end-1],[2:end])=a; %Assignment of triangular elements on adjacency matrix
b=b+b'; %Construct complete adjacency matrix
n=10;
b([1:n+1:end])=1000000; %Replace diagonal elements with sufficiently large ones
prob=optimproblem;
x=optimvar('x',n,n,'Type','integer','LowerBound',0,'UpperBound',1);
u=optimvar('u',n,'LowerBound',0) %Sequence number variable
prob.Objective=sum(sum(b.*x));
prob.Constraints.con1=[sum(x,2)==1; sum(x,1)'==1; u(1)==0];con2 = [1<=u(2:end); u(2:end)<=14];
for i=1:n
for j=2:n
con2 = [con2; u(i)-u(j)+n*x(i,j)<=n-1];
end
end
prob.Constraints.con2 = con2;
[sol, fval, flag]=solve(prob)
xx=sol.x; [i,j]=find(xx);
fprintf('xij=1 The corresponding row and column positions are as follows:\n')
ij=[i'; j']
Where b([1:n+1:end])=1000000; The principle of matrix b is that the elements of matrix b are sorted by column and recorded as b(n). For example, the order of matrix elements of 3 * 3 is