Nvidia TX1 TX2 Serial Communication Method
Nvidia TX2 Serial Port
Using Invida embedded board for serial communication.
Serial port hardware
The serial port position is the red box position shown below, which indicates UARTQ20 and J17.
Board Serial Port Description
The serial port has 6 pins. The first one near the edge of the board is the GND pin, which is grounded.
Fourth TX pin;
The fifth RX pin;
Connect to Host via USB connection.
Hardware Connection Mode
Connect TX2 pin to host USB

Testing tools and methods
Under linux environment, cutecom is used on Host and nvidia device respectively.
- It can be installed using sudo apt-get install cutecom.
- After installation, use sudo cutecom to start the program.
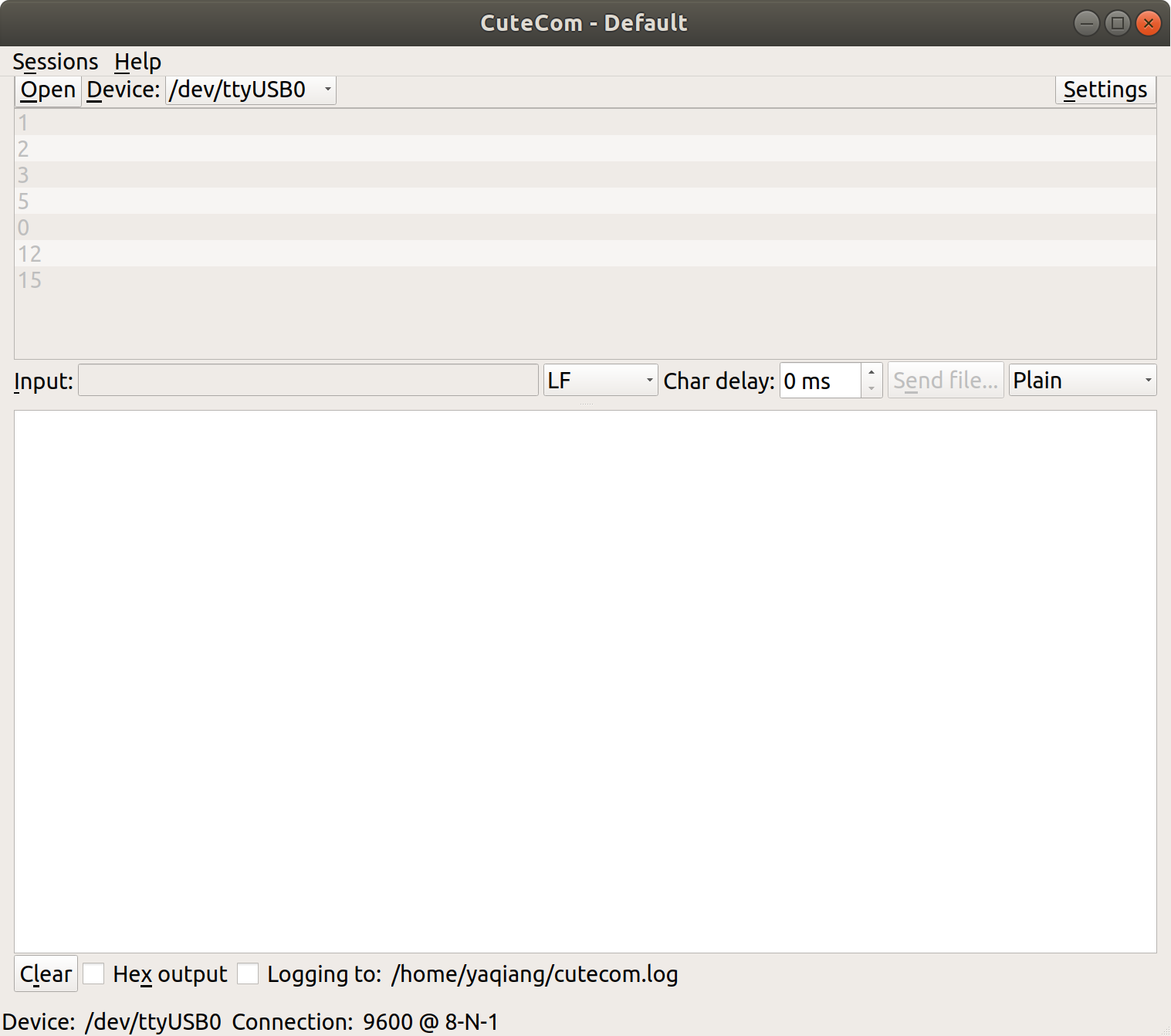
The startup interface is as follows:
Explain:
- Device: Select the serial name, the serial name on Host is ttyUSB* naming mode, and ttyTHS2 on Yingda TX2, which can modify the string name.
- Settings: Set the baud rate and so on. The two settings are the same.
- Click Open to start the communication.
- After Input, the input content will be sent to the serial port through the software to start communication.
- The upper blank shows the content received by the serial port, and the lower blank shows the input Input history.
c + + communication code
It contains three files, serialport.h, serialport.cpp and main.cpp.
serialport.h:
#ifndef BINOCULAR_CUSTOM_SERIALPORT_H #define BINOCULAR_CUSTOM_SERIALPORT_H #include <string> #include <termios.h> #include <vector> struct termios; class SerialPort { public: enum BaudRate { BR0 = 0000000, BR50 = 0000001, BR75 = 0000002, BR110 = 0000003, BR134 = 0000004, BR150 = 0000005, BR200 = 0000006, BR300 = 0000007, BR600 = 0000010, BR1200 = 0000011, BR1800 = 0000012, BR2400 = 0000013, BR4800 = 0000014, BR9600 = 0000015, BR19200 = 0000016, BR38400 = 0000017, BR57600 = 0010001, BR115200 = 0010002, BR230400 = 0010003, BR460800 = 0010004, BR500000 = 0010005, BR576000 = 0010006, BR921600 = 0010007, BR1000000 = 0010010, BR1152000 = 0010011, BR1500000 = 0010012, BR2000000 = 0010013, BR2500000 = 0010014, BR3000000 = 0010015, BR3500000 = 0010016, BR4000000 = 0010017 }; enum DataBits { DataBits5, DataBits6, DataBits7, DataBits8, }; enum StopBits { StopBits1, StopBits2 }; enum Parity { ParityNone, ParityEven, PariteMark, ParityOdd, ParitySpace }; struct OpenOptions { bool autoOpen; BaudRate baudRate; DataBits dataBits; StopBits stopBits; Parity parity; bool xon; bool xoff; bool xany; int vmin; int vtime; }; static BaudRate BaudRateMake(unsigned long baudrate); static const OpenOptions defaultOptions; explicit SerialPort(const std::string& path, const OpenOptions options = defaultOptions); bool open(); bool open(const std::string& path, const OpenOptions& options); bool isOpen() const; int write(const void *data, int length); int read(void *data, int length); void close(); static std::vector<std::string > list(); protected: void termiosOptions(termios& tios, const OpenOptions& options); private: std::string _path; OpenOptions _open_options; int _tty_fd; bool _is_open; }; bool operator==(const SerialPort::OpenOptions& lhs, const SerialPort::OpenOptions& rhs); bool operator!=(const SerialPort::OpenOptions& lhs, const SerialPort::OpenOptions& rhs); #endif //BINOCULAR_CUSTOM_SERIALPORT_H
serialport.cpp:
// // Created by yaqiang on 7/22/19. // #include <dirent.h> #include <unistd.h> #include <fcntl.h> #include <termios.h> #include "serialport.h" const SerialPort::OpenOptions SerialPort::defaultOptions = { true, // bool autoOpen; SerialPort::BR9600, // BaudRate baudRate; SerialPort::DataBits8, // DataBits dataBits; SerialPort::StopBits1, // StopBits stopBits; SerialPort::ParityNone,// Parity parity; false, // input xon false, // input xoff false, // input xany 0, // c_cc vmin 50, // c_cc vtime }; SerialPort::SerialPort(const std::string &path, const OpenOptions options) : _path(path), _open_options(options) { if(options.autoOpen) { printf("opening!\n"); _is_open = open(_path, _open_options); } } bool SerialPort::open() { return _is_open = open(_path, _open_options), _is_open; } bool SerialPort::open(const std::string &path, const OpenOptions &options) { if(_path != path) _path = path; if(_open_options != options) _open_options = options; _tty_fd = ::open(path.c_str(), O_RDWR | O_NOCTTY | O_NONBLOCK); if(_tty_fd < 0) { return false; } struct termios tios; termiosOptions(tios, options); tcsetattr(_tty_fd, TCSANOW, &tios); tcflush(_tty_fd, TCIOFLUSH); return true; } void SerialPort::termiosOptions(termios &tios, const OpenOptions &options) { tcgetattr(_tty_fd, &tios); tios.c_oflag = 0; tios.c_iflag = 0; tios.c_lflag = 0; cfsetispeed(&tios, options.baudRate); cfsetospeed(&tios, options.baudRate); tios.c_iflag |= (options.xon ? IXON : 0) | (options.xoff ? IXOFF: 0) | (options.xany ? IXANY : 0); // data bits int databits[] = {CS5, CS6, CS7, CS8}; tios.c_cflag &= ~0x30; tios.c_cflag |= databits[options.dataBits]; // stop bits if(options.stopBits == StopBits2) { tios.c_cflag |= CSTOPB; } else { tios.c_cflag &= ~CSTOPB; } // parity if(options.parity == ParityNone) { tios.c_cflag &= ~PARENB; } else { tios.c_cflag |= PARENB; if(options.parity == PariteMark) { tios.c_cflag |= PARMRK; } else { tios.c_cflag &= ~PARMRK; } if(options.parity == ParityOdd) { tios.c_cflag |= PARODD; } else { tios.c_cflag &= ~PARODD; } } tios.c_cc[VMIN] = options.vmin; tios.c_cc[VTIME] = options.vtime; } bool SerialPort::isOpen() const { return _is_open; } int SerialPort::write(const void *data, int length) { return ::write(_tty_fd, data, length); } int SerialPort::read(void *data, int length) { return ::read(_tty_fd, data, length); } void SerialPort::close() { ::close(_tty_fd); _is_open = false; } SerialPort::BaudRate SerialPort::BaudRateMake(unsigned long baudrate) { switch (baudrate) { case 50: return BR50; case 75: return BR75; case 134: return BR134; case 150: return BR150; case 200: return BR200; case 300: return BR300; case 600: return BR600; case 1200: return BR1200; case 1800: return BR1800; case 2400: return BR2400; case 4800: return BR4800; case 9600: return BR9600; case 19200: return BR19200; case 38400: return BR38400; case 57600: return BR57600; case 115200: return BR115200; case 230400: return BR230400; case 460800: return BR460800; case 500000: return BR500000; case 576000: return BR576000; case 921600: return BR921600; case 1000000: return BR1000000; case 1152000: return BR1152000; case 1500000: return BR1500000; case 2000000: return BR2000000; case 2500000: return BR2500000; case 3000000: return BR3000000; case 3500000: return BR3500000; case 4000000: return BR4000000; default: break; } return BR0; } std::vector<std::string> SerialPort::list() { DIR *dir; struct dirent *ent; dir = opendir("/dev"); std::vector<std::string> ttyList; while(ent = readdir(dir), ent != nullptr) { if("tty" == std::string(ent->d_name).substr(0, 3)) { ttyList.emplace_back(ent->d_name); } } return ttyList; } bool operator==(const SerialPort::OpenOptions& lhs, const SerialPort::OpenOptions& rhs) { return lhs.autoOpen == rhs.autoOpen && lhs.baudRate == rhs.baudRate && lhs.dataBits == rhs.dataBits && lhs.parity == rhs.parity && lhs.stopBits == rhs.stopBits && lhs.vmin == rhs.vmin && lhs.vtime == rhs.vtime && lhs.xon == rhs.xon && lhs.xoff == rhs.xoff && lhs.xany == rhs.xany; } bool operator!=(const SerialPort::OpenOptions& lhs, const SerialPort::OpenOptions& rhs) { return !(lhs == rhs); }
main.cpp:
#include "serialport.h" typedef unsigned char uchar; int main() { printf("begin!\n"); SerialPort serialPort = SerialPort("/dev/ttyUSB0"); printf("connecting!\n"); serialPort.open(); if(serialPort.isOpen()) printf("connected!\n"); else { printf("connect failed!\n"); return 0; } char* buffer = new char[10]; for(int i=0;i<10;i++) { buffer[i]='a'; } printf("begin write!\n"); serialPort.write(buffer,sizeof(char)*10); printf("write end!\n"); // serialPort.close(); // serialPort.open(); // int* buffer2= new int[10]; // int* buffer2; // serialPort.read(buffer2,sizeof(int)*10); // for(int i=0;i<10;i++) // { // printf("%d \n",buffer2[i]); // } serialPort.close(); if(serialPort.isOpen()) printf("still connecting!\n"); else { printf("connect closed!\n"); return 0; } }
To be completed