preface
TensorRT is an efficient deep learning model reasoning framework launched by NVIDIA. It includes deep learning reasoning optimizer and runtime, which can make deep learning reasoning applications have the advantages of low latency and high throughput.
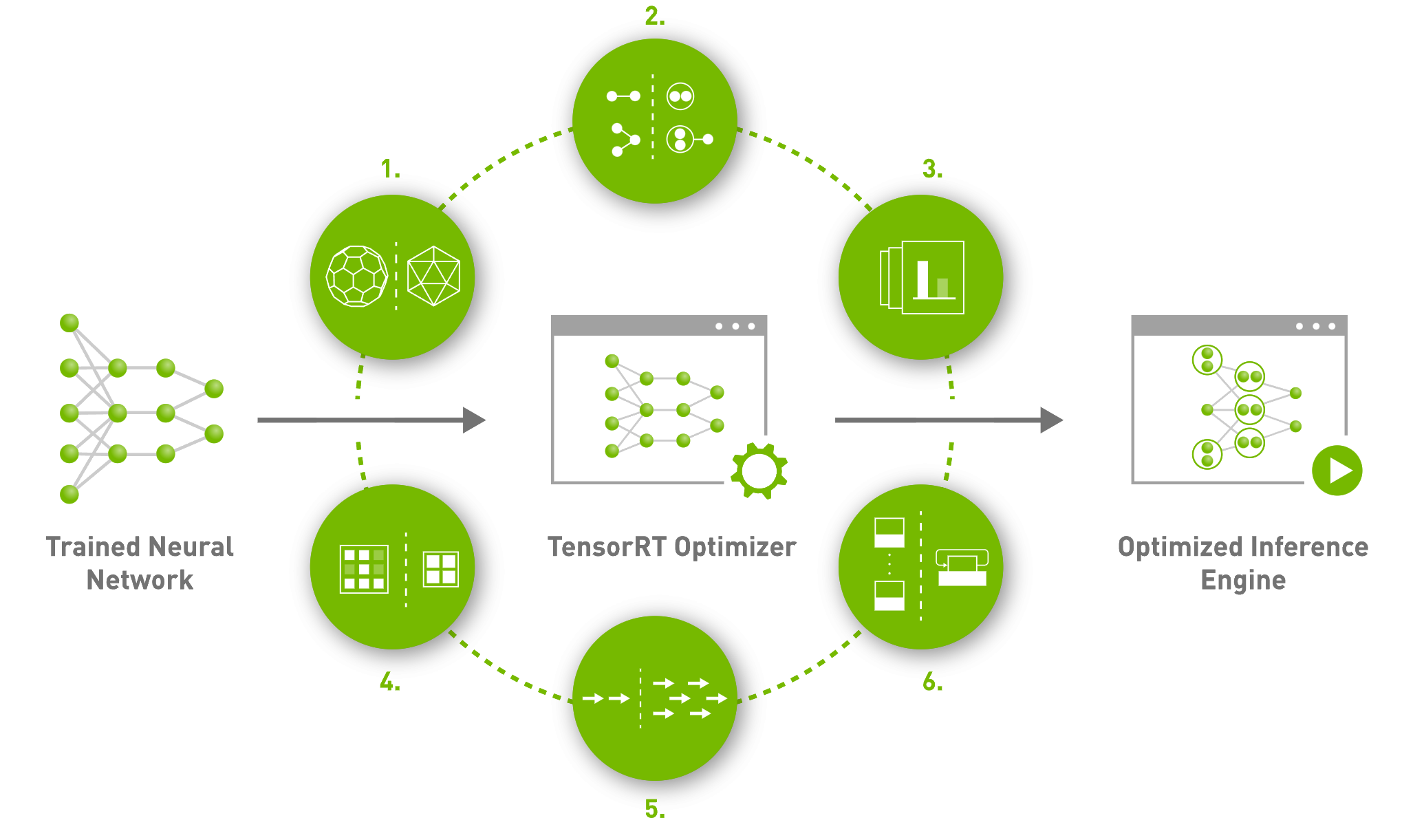
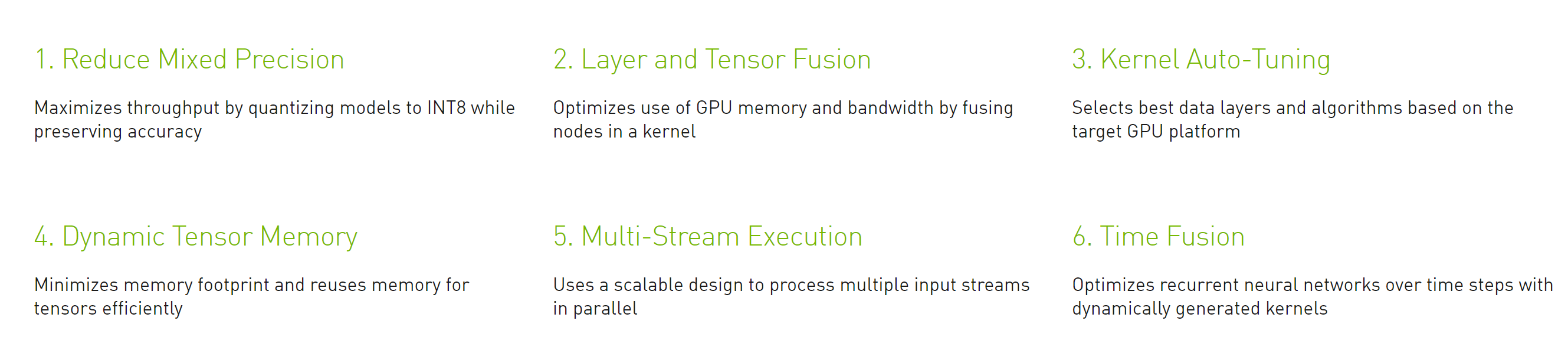
In essence, it is to accelerate the reasoning speed of the whole network by fusing some operators in the model, selecting better implementation methods for operators with specific sizes, and using mixed accuracy.
After using PyTorch to train the network model, we hope to accelerate the model reasoning through TensorRT during model deployment. Then we can first convert the PyTorch model to ONNX, and then turn ONNX to TensorRT engine.
Implementation steps
PyTorch model to ONNX
The specific process can be referred to PyTorch model to ONNX format_ TracelessLe's column - CSDN blog
ONNX to TensorRT engine
Method 1: trtexec
Directly use trtexec command line to convert ONNX model to TensorRT engine:
trtexec --onnx=net_bs8_v1_simple.onnx --tacticSources=-cublasLt,+cublas --workspace=2048 --fp16 --saveEngine=net_bs8_v1.engine --verbose
Note: (Reference: TensorRT-trtexec-README)
① -- ONNX specifies the ONNX file path
② -- tacticSources specifies the method library to use
③ -- workspace specifies the size of the workspace in MB
④ -- FP16 enable FP16 mode
⑤ -- saveEngine specifies the save path of the generated engine
⑥ -- verbose open verbose mode for more printing information.
Under normal circumstances, the engine file can be generated normally after a long waiting time. In case of any problem, it needs to be analyzed according to the specific problem.
Method 2: engine generation based on Python API
TensorRT provides API s such as C + + and Python, which can be used to generate engine.
__author__ = 'TracelessLe'
import os
import tensorrt as trt
ONNX_SIM_MODEL_PATH = 'net_bs8_v1_simple.onnx'
TENSORRT_ENGINE_PATH_PY = 'net_bs8_v1_fp16_py.engine'
def build_engine(onnx_file_path, engine_file_path, flop=16):
trt_logger = trt.Logger(trt.Logger.VERBOSE) # trt.Logger.ERROR
builder = trt.Builder(trt_logger)
network = builder.create_network(
1 << (int)(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH)
)
parser = trt.OnnxParser(network, trt_logger)
# parse ONNX
with open(onnx_file_path, 'rb') as model:
if not parser.parse(model.read()):
print('ERROR: Failed to parse the ONNX file.')
for error in range(parser.num_errors):
print(parser.get_error(error))
return None
print("Completed parsing ONNX file")
builder.max_workspace_size = 2 << 30
# default = 1 for fixed batch size
builder.max_batch_size = 1
# set mixed flop computation for the best performance
if builder.platform_has_fast_fp16 and flop == 16:
builder.fp16_mode = True
if os.path.isfile(engine_file_path):
try:
os.remove(engine_file_path)
except Exception:
print("Cannot remove existing file: ",
engine_file_path)
print("Creating Tensorrt Engine")
config = builder.create_builder_config()
config.set_tactic_sources(1 << int(trt.TacticSource.CUBLAS))
config.max_workspace_size = 2 << 30
config.set_flag(trt.BuilderFlag.FP16)
engine = builder.build_engine(network, config)
with open(engine_file_path, "wb") as f:
f.write(engine.serialize())
print("Serialized Engine Saved at: ", engine_file_path)
return engine
if __name__ == "__main__":
build_engine(ONNX_SIM_MODEL_PATH, TENSORRT_ENGINE_PATH_PY)
Under normal circumstances, this method can generate the same engine file as trtexec, and has the same file size and reasoning speed.
Result comparison
Compare the results obtained by engine reasoning with the results obtained by ONNX:
__author__ = 'TracelessLe'
import os
import time
import onnxruntime
import pycuda.driver as cuda
import tensorrt as trt
import numpy as np
ONNX_SIM_MODEL_PATH = 'net_bs8_v1_simple.onnx'
TENSORRT_ENGINE_PATH_PY = 'net_bs8_v1_fp16_py.engine'
def get_numpy_data():
batch_size = 8
img_input = np.ones((batch_size, 3, 128, 128), dtype=np.float32)
return img_input
def test_onnx(inputs, loop=100):
inputs = inputs.astype(np.float32)
print(onnxruntime.get_device())
sess = onnxruntime.InferenceSession(ONNX_SIM_MODEL_PATH)
batch_size = 8
time1 = time.time()
for i in range(loop):
time_bs1 = time.time()
out_ort_img = sess.run(None, {sess.get_inputs()[0].name: inputs,})
time_bs2 = time.time()
time_use_onnx_bs = time_bs2 - time_bs1
print(f'ONNX use time {time_use_onnx_bs} for bs8')
time2 = time.time()
time_use_onnx = time2-time1
print(f'ONNX use time {time_use_onnx} for loop {loop}, FPS={loop*batch_size//time_use_onnx}')
return out_ort_img
class HostDeviceMem(object):
def __init__(self, host_mem, device_mem):
self.host = host_mem
self.device = device_mem
def __str__(self):
return "Host:\n" + str(self.host) + "\nDevice:\n" + str(self.device)
def __repr__(self):
return self.__str__()
def _load_engine(engine_file_path):
trt_logger = trt.Logger(trt.Logger.ERROR)
with open(engine_file_path, 'rb') as f:
with trt.Runtime(trt_logger) as runtime:
engine = runtime.deserialize_cuda_engine(f.read())
print('_load_engine ok.')
return engine
def _allocate_buffer(engine):
binding_names = []
for idx in range(100):
bn = engine.get_binding_name(idx)
if bn:
binding_names.append(bn)
else:
break
inputs = []
outputs = []
bindings = [None] * len(binding_names)
stream = cuda.Stream()
for binding in binding_names:
binding_idx = engine[binding]
if binding_idx == -1:
print("Error Binding Names!")
continue
size = trt.volume(engine.get_binding_shape(binding)) * engine.max_batch_size
dtype = trt.nptype(engine.get_binding_dtype(binding))
host_mem = cuda.pagelocked_empty(size, dtype)
device_mem = cuda.mem_alloc(host_mem.nbytes)
bindings[binding_idx] = int(device_mem)
if engine.binding_is_input(binding):
inputs.append(HostDeviceMem(host_mem, device_mem))
else:
outputs.append(HostDeviceMem(host_mem, device_mem))
return inputs, outputs, bindings, stream
def _test_engine(engine_file_path, data_input, num_times=100):
# Code from blog.csdn.net/TracelessLe
engine = _load_engine(engine_file_path)
# print(engine)
input_bufs, output_bufs, bindings, stream = _allocate_buffer(engine)
batch_size = 8
context = engine.create_execution_context()
###heat###
input_bufs[0].host = data_input
cuda.memcpy_htod_async(
input_bufs[0].device,
input_bufs[0].host,
stream
)
context.execute_async_v2(
bindings=bindings,
stream_handle=stream.handle
)
cuda.memcpy_dtoh_async(
output_bufs[0].host,
output_bufs[0].device,
stream
)
stream.synchronize()
trt_outputs = [output_bufs[0].host.copy()]
##########
start = time.time()
for _ in range(num_times):
time_bs1 = time.time()
input_bufs[0].host = data_input
cuda.memcpy_htod_async(
input_bufs[0].device,
input_bufs[0].host,
stream
)
context.execute_async_v2(
bindings=bindings,
stream_handle=stream.handle
)
cuda.memcpy_dtoh_async(
output_bufs[0].host,
output_bufs[0].device,
stream
)
stream.synchronize()
trt_outputs = [output_bufs[0].host.copy()]
time_bs2 = time.time()
time_use_bs = time_bs2 - time_bs1
print(f'TRT use time {time_use_bs} for bs8')
end = time.time()
time_use_trt = end - start
print(f"TRT use time {(time_use_trt)}for loop {num_times}, FPS={num_times*batch_size//time_use_trt}")
return trt_outputs
def test_engine(data_input, loop=100):
engine_file_path = TENSORRT_ENGINE_PATH_PY
cuda.init()
cuda_ctx = cuda.Device(0).make_context()
trt_outputs = None
try:
trt_outputs = _test_engine(engine_file_path, data_input, loop)
finally:
cuda_ctx.pop()
return trt_outputs
if __name__ == "__main__":
img_input = get_numpy_data()
trt_outputs = test_engine(img_input, 100)
trt_outputs = trt_outputs[0].reshape((8,3,128,128))
trt_image_numpy = (np.transpose(trt_outputs[0], (1, 2, 0)) + 1) / 2.0 * 255.0
trt_image_numpy = np.clip(trt_image_numpy, 0, 255)
out_ort_img = test_onnx(img_input, loop=1)[0]
onnx_image_numpy = (np.transpose(out_ort_img[0], (1, 2, 0)) + 1) / 2.0 * 255.0
onnx_image_numpy = np.clip(onnx_image_numpy, 0, 255)
mse = np.square(np.subtract(onnx_image_numpy, trt_image_numpy)).mean()
print('mse between onnx and trt result: ', mse)
Other instructions
(1) PyTorch to TensorRT engine
Methods in addition to the conventional PyTorch - > onnx - > tensorrt, there are other methods, such as NVIDIA-AI-IOT torch2trt And NVIDIA TRTorch , you can also try.
(2) ONNX operator support
TensorRT does not support all ONNX operators. See the specific support list Related documents.
(3)engine debug
TensorRT provides a set of tools that can be used for debug ging during engine generation, including Polygraphy, ONNX GraphSurgeon and pytorch quantification. These gadgets are very useful and worthy of further research.
Copyright description
This article is an original article, which is exclusively published in blog.csdn.net/TracelessLe No reprint is allowed without personal permission. If you need help, please email tracelessle@163.com.
reference material
[1] NVIDIA TensorRT | NVIDIA Developer
[2] TensorRT-trtexec-README
[3] PyTorch model to ONNX format _tracelesslecolumn - CSDN blog
[4] How to use TensorRT to accelerate the trained PyTorch model? - cloud + community - Tencent cloud
[5] How to Convert a Model from PyTorch to TensorRT and Speed Up Inference | LearnOpenCV #
[6] How to use TensorRT to accelerate the trained PyTorch model? - what do you know
[7] TensorRT tutorial 3: converting to engine using the trtexec tool
[8] onnx-tensorrt/operators.md at master · onnx/onnx-tensorrt
[9] mmediting/onnx2tensorrt.py at master · open-mmlab/mmediting
[10] TensorRT detailed introduction to the north. If you don't know TensorRT, come and have a look! - SegmentFault
[11] Share some valuable in-depth learning about NVIDIA new technology for AI deployment - what do you know