Make target detection data set similar to pascal voc format: https://www.cnblogs.com/xiximayou/p/12546061.html
Source: https://github.com/amdegroot/ssd.pytorch
The copied code has many holes to step on...
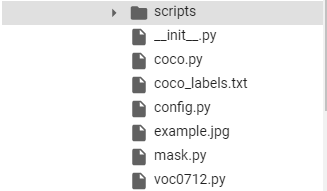
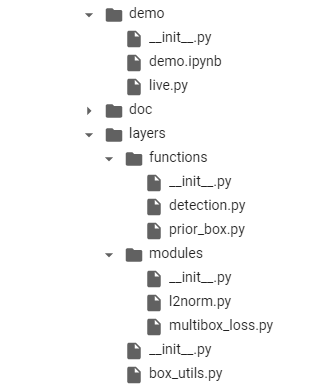
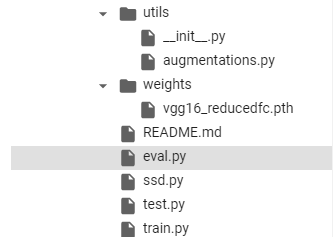
I uploaded it to Google collab. The current directory structure is as follows:
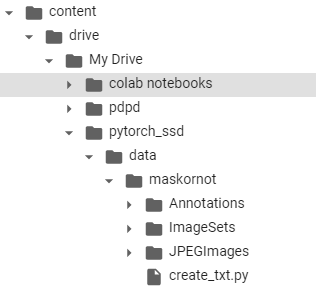
It should be noted that although we only have two categories, we need to add background, so we have three categories in total.
First, we need to read our own data set
In config.py
# config.py import os.path # gets home dir cross platform #HOME = os.path.expanduser("~") HOME = os.path.expanduser("/content/drive/My Drive/pytorch_ssd/") # for making bounding boxes pretty COLORS = ((255, 0, 0, 128), (0, 255, 0, 128), (0, 0, 255, 128), (0, 255, 255, 128), (255, 0, 255, 128), (255, 255, 0, 128)) MEANS = (104, 117, 123) mask = { 'num_classes': 3, 'lr_steps': (80000, 100000, 120000), 'max_iter': 120000, 'feature_maps': [38, 19, 10, 5, 3, 1], 'min_dim': 300, 'steps': [8, 16, 32, 64, 100, 300], 'min_sizes': [30, 60, 111, 162, 213, 264], 'max_sizes': [60, 111, 162, 213, 264, 315], 'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]], 'variance': [0.1, 0.2], 'clip': True, 'name': 'MASK', } # SSD300 CONFIGS voc = { 'num_classes': 21, 'lr_steps': (80000, 100000, 120000), 'max_iter': 120000, 'feature_maps': [38, 19, 10, 5, 3, 1], 'min_dim': 300, 'steps': [8, 16, 32, 64, 100, 300], 'min_sizes': [30, 60, 111, 162, 213, 264], 'max_sizes': [60, 111, 162, 213, 264, 315], 'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]], 'variance': [0.1, 0.2], 'clip': True, 'name': 'VOC', } coco = { 'num_classes': 201, 'lr_steps': (280000, 360000, 400000), 'max_iter': 400000, 'feature_maps': [38, 19, 10, 5, 3, 1], 'min_dim': 300, 'steps': [8, 16, 32, 64, 100, 300], 'min_sizes': [21, 45, 99, 153, 207, 261], 'max_sizes': [45, 99, 153, 207, 261, 315], 'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]], 'variance': [0.1, 0.2], 'clip': True, 'name': 'COCO', }
In the new mask.py
"""VOC Dataset Classes Original author: Francisco Massa https://github.com/fmassa/vision/blob/voc_dataset/torchvision/datasets/voc.py Updated by: Ellis Brown, Max deGroot """ from .config import HOME import os.path as osp import sys import torch import torch.utils.data as data import cv2 import numpy as np if sys.version_info[0] == 2: import xml.etree.cElementTree as ET else: import xml.etree.ElementTree as ET
#There are two categories, one is mask: wear mask, the other is nomack: do not wear mask MASK_CLASSES
= ( # always index 0 'mask','nomask') # note: if you used our download scripts, this should be right
MASK_ROOT = osp.join(HOME, "data/maskornot/") class MASKAnnotationTransform(object): """Transforms a MASK annotation into a Tensor of bbox coords and label index Initilized with a dictionary lookup of classnames to indexes Arguments: class_to_ind (dict, optional): dictionary lookup of classnames -> indexes (default: alphabetic indexing of MASK's 2 classes) keep_difficult (bool, optional): keep difficult instances or not (default: False) height (int): height width (int): width """ def __init__(self, class_to_ind=None, keep_difficult=False): self.class_to_ind = class_to_ind or dict( zip(MASK_CLASSES, range(len(MASK_CLASSES)))) self.keep_difficult = keep_difficult def __call__(self, target, width, height): """ Arguments: target (annotation) : the target annotation to be made usable will be an ET.Element Returns: a list containing lists of bounding boxes [bbox coords, class name] """ res = [] for obj in target.iter('object'): difficult = int(obj.find('difficult').text) == 1 if not self.keep_difficult and difficult: continue name = obj.find('name').text.lower().strip() bbox = obj.find('bndbox') pts = ['xmin', 'ymin', 'xmax', 'ymax'] bndbox = [] for i, pt in enumerate(pts): cur_pt = int(bbox.find(pt).text) - 1 # scale height or width cur_pt = cur_pt / width if i % 2 == 0 else cur_pt / height bndbox.append(cur_pt) label_idx = self.class_to_ind[name] bndbox.append(label_idx) res += [bndbox] # [xmin, ymin, xmax, ymax, label_ind] # img_id = target.find('filename').text[:-4] return res # [[xmin, ymin, xmax, ymax, label_ind], ... ] class MASKDetection(data.Dataset): """VOC Detection Dataset Object input is image, target is annotation Arguments: root (string): filepath to VOCdevkit folder. image_set (string): imageset to use (eg. 'train', 'val', 'test') transform (callable, optional): transformation to perform on the input image target_transform (callable, optional): transformation to perform on the target `annotation` (eg: take in caption string, return tensor of word indices) dataset_name (string, optional): which dataset to load (default: 'VOC2007') """ #image_sets=[('2007', 'trainval'), ('2012', 'trainval')], def __init__(self, root, image_sets='trainval', transform=None, target_transform=MASKAnnotationTransform(), dataset_name='MASK'): self.root = root self.image_set = image_sets self.transform = transform self.target_transform = target_transform self.name = dataset_name self._annopath = osp.join('%s', 'Annotations', '%s.xml') self._imgpath = osp.join('%s', 'JPEGImages', '%s.jpg') self.ids = list() for line in open(MASK_ROOT+'/ImageSets/Main/'+self.image_set+'.txt'): self.ids.append((MASK_ROOT, line.strip())) def __getitem__(self, index): im, gt, h, w = self.pull_item(index) return im, gt def __len__(self): return len(self.ids) def pull_item(self, index): img_id = self.ids[index] target = ET.parse(self._annopath % img_id).getroot() img = cv2.imread(self._imgpath % img_id) height, width, channels = img.shape if self.target_transform is not None: target = self.target_transform(target, width, height) if self.transform is not None: target = np.array(target) img, boxes, labels = self.transform(img, target[:, :4], target[:, 4]) # to rgb img = img[:, :, (2, 1, 0)] # img = img.transpose(2, 0, 1) target = np.hstack((boxes, np.expand_dims(labels, axis=1))) return torch.from_numpy(img).permute(2, 0, 1), target, height, width # return torch.from_numpy(img), target, height, width def pull_image(self, index): '''Returns the original image object at index in PIL form Note: not using self.__getitem__(), as any transformations passed in could mess up this functionality. Argument: index (int): index of img to show Return: PIL img ''' img_id = self.ids[index] return cv2.imread(self._imgpath % img_id, cv2.IMREAD_COLOR) def pull_anno(self, index): '''Returns the original annotation of image at index Note: not using self.__getitem__(), as any transformations passed in could mess up this functionality. Argument: index (int): index of img to get annotation of Return: list: [img_id, [(label, bbox coords),...]] eg: ('001718', [('dog', (96, 13, 438, 332))]) ''' img_id = self.ids[index] anno = ET.parse(self._annopath % img_id).getroot() gt = self.target_transform(anno, 1, 1) return img_id[1], gt def pull_tensor(self, index): '''Returns the original image at an index in tensor form Note: not using self.__getitem__(), as any transformations passed in could mess up this functionality. Argument: index (int): index of img to show Return: tensorized version of img, squeezed ''' return torch.Tensor(self.pull_image(index)).unsqueeze_(0)
This file is copied to voc0712.py for modification. The modified place is marked in red.
Also note that in the "init" section of the data folder
#from .voc0712 import VOCDetection, VOCAnnotationTransform, VOC_CLASSES, VOC_ROOT #from .coco import COCODetection, COCOAnnotationTransform, COCO_CLASSES, COCO_ROOT, get_label_map from .mask import MASKDetection, MASKAnnotationTransform, MASK_CLASSES, MASK_ROOT
We need to unregister voc and coco, plus our custom dataset
Then we will start our step-by-step journey.
We need the weight of the pre trained vgg, enter the weights directory, and enter:
!wget https://s3.amazonaws.com/amdegroot-models/vgg16_reducedfc.pth
Let's see what we have changed in ssd.py:
(1) Add at the beginning
(2) Add mask and modify category

(3) Remove the volatile=True in self.priors = Variable(self.priorbox.forward(), volatile=True)
Since the new version of pytorch has merged Variable and Tensor, and removed volatile, use with torch.no'grad to change to:
with torch.no_grad(): self.priors = self.priorbox.forward()
In train.py:
from data import * from utils.augmentations import SSDAugmentation from layers.modules import MultiBoxLoss from ssd import build_ssd import os import sys import time import torch from torch.autograd import Variable import torch.nn as nn import torch.optim as optim import torch.backends.cudnn as cudnn import torch.nn.init as init import torch.utils.data as data import numpy as np import argparse def str2bool(v): return v.lower() in ("yes", "true", "t", "1") parser = argparse.ArgumentParser( description='Single Shot MultiBox Detector Training With Pytorch') train_set = parser.add_mutually_exclusive_group() parser.add_argument('--dataset', default='VOC', choices=['VOC', 'COCO','MASK'], type=str, help='VOC or COCO') parser.add_argument('--dataset_root', default=MASK_ROOT, help='Dataset root directory path') parser.add_argument('--basenet', default='vgg16_reducedfc.pth', help='Pretrained base model') parser.add_argument('--batch_size', default=32, type=int, help='Batch size for training') parser.add_argument('--resume', default=None, type=str, help='Checkpoint state_dict file to resume training from') parser.add_argument('--start_iter', default=0, type=int, help='Resume training at this iter') parser.add_argument('--num_workers', default=4, type=int, help='Number of workers used in dataloading') parser.add_argument('--cuda', default=True, type=str2bool, help='Use CUDA to train model') parser.add_argument('--lr', '--learning-rate', default=1e-3, type=float, help='initial learning rate') parser.add_argument('--momentum', default=0.9, type=float, help='Momentum value for optim') parser.add_argument('--weight_decay', default=5e-4, type=float, help='Weight decay for SGD') parser.add_argument('--gamma', default=0.1, type=float, help='Gamma update for SGD') parser.add_argument('--visdom', default=False, type=str2bool, help='Use visdom for loss visualization') parser.add_argument('--save_folder', default='weights/', help='Directory for saving checkpoint models') args = parser.parse_args() if torch.cuda.is_available(): if args.cuda: torch.set_default_tensor_type('torch.cuda.FloatTensor') if not args.cuda: print("WARNING: It looks like you have a CUDA device, but aren't " + "using CUDA.\nRun with --cuda for optimal training speed.") torch.set_default_tensor_type('torch.FloatTensor') else: torch.set_default_tensor_type('torch.FloatTensor') if not os.path.exists(args.save_folder): os.mkdir(args.save_folder) def train(): if args.dataset == 'COCO': if args.dataset_root == VOC_ROOT: if not os.path.exists(COCO_ROOT): parser.error('Must specify dataset_root if specifying dataset') print("WARNING: Using default COCO dataset_root because " + "--dataset_root was not specified.") args.dataset_root = COCO_ROOT cfg = coco dataset = COCODetection(root=args.dataset_root, transform=SSDAugmentation(cfg['min_dim'], MEANS)) elif args.dataset == 'VOC': if args.dataset_root == COCO_ROOT: parser.error('Must specify dataset if specifying dataset_root') cfg = voc dataset = VOCDetection(root=args.dataset_root, transform=SSDAugmentation(cfg['min_dim'], MEANS)) elif args.dataset == "MASK": if args.dataset_root == MASK_ROOT: parser.error('Must specify dataset if specifying dataset_root') cfg = mask dataset = MASKDetection(root=args.dataset_root, transform=SSDAugmentation(cfg['min_dim'], MEANS)) if args.visdom: import visdom viz = visdom.Visdom() ssd_net = build_ssd('train', cfg['min_dim'], cfg['num_classes']) net = ssd_net if args.cuda: net = torch.nn.DataParallel(ssd_net) cudnn.benchmark = True if args.resume: print('Resuming training, loading {}...'.format(args.resume)) ssd_net.load_weights(args.resume) else: vgg_weights = torch.load(args.save_folder + args.basenet) print('Loading base network...') ssd_net.vgg.load_state_dict(vgg_weights) if args.cuda: net = net.cuda() if not args.resume: print('Initializing weights...') # initialize newly added layers' weights with xavier method ssd_net.extras.apply(weights_init) ssd_net.loc.apply(weights_init) ssd_net.conf.apply(weights_init) optimizer = optim.SGD(net.parameters(), lr=args.lr, momentum=args.momentum, weight_decay=args.weight_decay) criterion = MultiBoxLoss(cfg['num_classes'], 0.5, True, 0, True, 3, 0.5, False, args.cuda) net.train() # loss counters loc_loss = 0 conf_loss = 0 epoch = 0 print('Loading the dataset...') epoch_size = len(dataset) // args.batch_size print('Training SSD on:', dataset.name) print('Using the specified args:') print(args) step_index = 0 if args.visdom: vis_title = 'SSD.PyTorch on ' + dataset.name vis_legend = ['Loc Loss', 'Conf Loss', 'Total Loss'] iter_plot = create_vis_plot('Iteration', 'Loss', vis_title, vis_legend) epoch_plot = create_vis_plot('Epoch', 'Loss', vis_title, vis_legend) data_loader = data.DataLoader(dataset, args.batch_size, num_workers=args.num_workers, shuffle=True, collate_fn=detection_collate, pin_memory=True) # create batch iterator batch_iterator = iter(data_loader) for iteration in range(args.start_iter, cfg['max_iter']): if args.visdom and iteration != 0 and (iteration % epoch_size == 0): update_vis_plot(epoch, loc_loss, conf_loss, epoch_plot, None, 'append', epoch_size) # reset epoch loss counters loc_loss = 0 conf_loss = 0 epoch += 1 if iteration in cfg['lr_steps']: step_index += 1 adjust_learning_rate(optimizer, args.gamma, step_index) # load train data #images, targets = next(batch_iterator) try: images, targets = next(batch_iterator) except StopIteration: batch_iterator = iter(data_loader) images, targets = next(batch_iterator) if args.cuda: images = images.cuda() targets = [ann.cuda() for ann in targets] else: images = images targets = [ann for ann in targets] # forward t0 = time.time() out = net(images) # backprop optimizer.zero_grad() loss_l, loss_c = criterion(out, targets) loss = loss_l + loss_c loss.backward() optimizer.step() t1 = time.time() loc_loss += loss_l.data.item() conf_loss += loss_c.data.item() if iteration % 10 == 0: print('timer: %.4f sec.' % (t1 - t0)) print('iter ' + repr(iteration) + ' || Loss: %.4f ||' % (loss.data.item()), end=' ') if args.visdom: update_vis_plot(iteration, loss_l.data.item(), loss_c.data.item(), iter_plot, epoch_plot, 'append') if iteration != 0 and iteration % 5000 == 0: print('Saving state, iter:', iteration) torch.save(ssd_net.state_dict(), 'weights/ssd300_MASK_' + repr(iteration) + '.pth') torch.save(ssd_net.state_dict(), args.save_folder + '' + args.dataset + '.pth') def adjust_learning_rate(optimizer, gamma, step): """Sets the learning rate to the initial LR decayed by 10 at every specified step # Adapted from PyTorch Imagenet example: # https://github.com/pytorch/examples/blob/master/imagenet/main.py """ lr = args.lr * (gamma ** (step)) for param_group in optimizer.param_groups: param_group['lr'] = lr def xavier(param): init.xavier_uniform_(param) def weights_init(m): if isinstance(m, nn.Conv2d): xavier(m.weight.data) m.bias.data.zero_() def create_vis_plot(_xlabel, _ylabel, _title, _legend): return viz.line( X=torch.zeros((1,)).cpu(), Y=torch.zeros((1, 3)).cpu(), opts=dict( xlabel=_xlabel, ylabel=_ylabel, title=_title, legend=_legend ) ) def update_vis_plot(iteration, loc, conf, window1, window2, update_type, epoch_size=1): viz.line( X=torch.ones((1, 3)).cpu() * iteration, Y=torch.Tensor([loc, conf, loc + conf]).unsqueeze(0).cpu() / epoch_size, win=window1, update=update_type ) # initialize epoch plot on first iteration if iteration == 0: viz.line( X=torch.zeros((1, 3)).cpu(), Y=torch.Tensor([loc, conf, loc + conf]).unsqueeze(0).cpu(), win=window2, update=True ) if __name__ == '__main__': train()
We're going to use our own dataset where we need to. Then we need to pay attention to the following points:
- Error reporting: indexerror: invalid index of a 0-dim sensor. Use sensor. Item() to convert a 0-dim sensor to a python number, change data[0] to data.item()
- Error reporting: stop iteration, change images, targets = next (batch [iterator) to
try: images, targets = next(batch_iterator) except StopIteration: batch_iterator = iter(data_loader) images, targets = next(batch_iterator) - Error reported Xavier ﹣ uniform has been deprecated, use Xavier ﹣ uniform ﹣ instead
Next, in multibox_loss.py, you need to pay attention to:
Indexerror: the shape of the mask [32, 2990] at index 0 does not match the shape of the indexed sensor [95680, 1] at index 0

Error: userwarning: size_average and reduce args will be deprecated, please use reduction ='sum 'instead. Warnings.warn (warning. Format (RET)), will
Change "loss" = f.cross "(" conf "," targets "," weighted ", size", "average = false") to
loss_c = F.cross_entropy(conf_p, targets_weighted, reduction='sum')
Basically, there are so many problems. Finally, it should be noted that a relatively small learning rate, such as 1e-5, cannot be set as its default value.
Start of training:
!python train.py --dataset MASK --dataset_root MASK_ROOT --learning-rate 1e-5
Partial results:
Loading base network... Initializing weights... Loading the dataset... Training SSD on: MASK Using the specified args: Namespace(basenet='vgg16_reducedfc.pth', batch_size=32, cuda=True, dataset='MASK', dataset_root='MASK_ROOT', gamma=0.1, lr=1e-05, momentum=0.9, num_workers=4, resume=None, save_folder='weights/', start_iter=0, visdom=False, weight_decay=0.0005) /usr/local/lib/python3.6/dist-packages/torch/nn/_reduction.py:43: UserWarning: size_average and reduce args will be deprecated, please use reduction='sum' instead. warnings.warn(warning.format(ret)) timer: 10.9482 sec. iter 0 || Loss: 19.6539 || timer: 0.4676 sec. iter 10 || Loss: 18.4427 || timer: 0.2489 sec. iter 20 || Loss: 16.3053 || timer: 0.4680 sec. iter 30 || Loss: 14.5833 || timer: 0.4679 sec. iter 40 || Loss: 12.6759 || timer: 0.2453 sec. iter 50 || Loss: 11.4251 || timer: 0.4731 sec. iter 60 || Loss: 9.5738 || timer: 0.4748 sec. ......
Training results: only 5000 iterations of training results are saved here
Reference resources:
https://blog.csdn.net/weixin_43905350/article/details/100802246
https://blog.csdn.net/qq_30614451/article/details/100137358
https://cloud.tencent.com/developer/news/231868
https://blog.csdn.net/hitzijiyingcai/article/details/81636455