1, Trolley device
In the tutorial is the car device integrated on Taobao. In addition, I also bought some spare parts and configured my own car.
https://detail.tmall.com/item.htm?id=608554421638&spm=a1z09.2.0.0.7e012e8d3NEMy0&_u=12kf16b6b4b
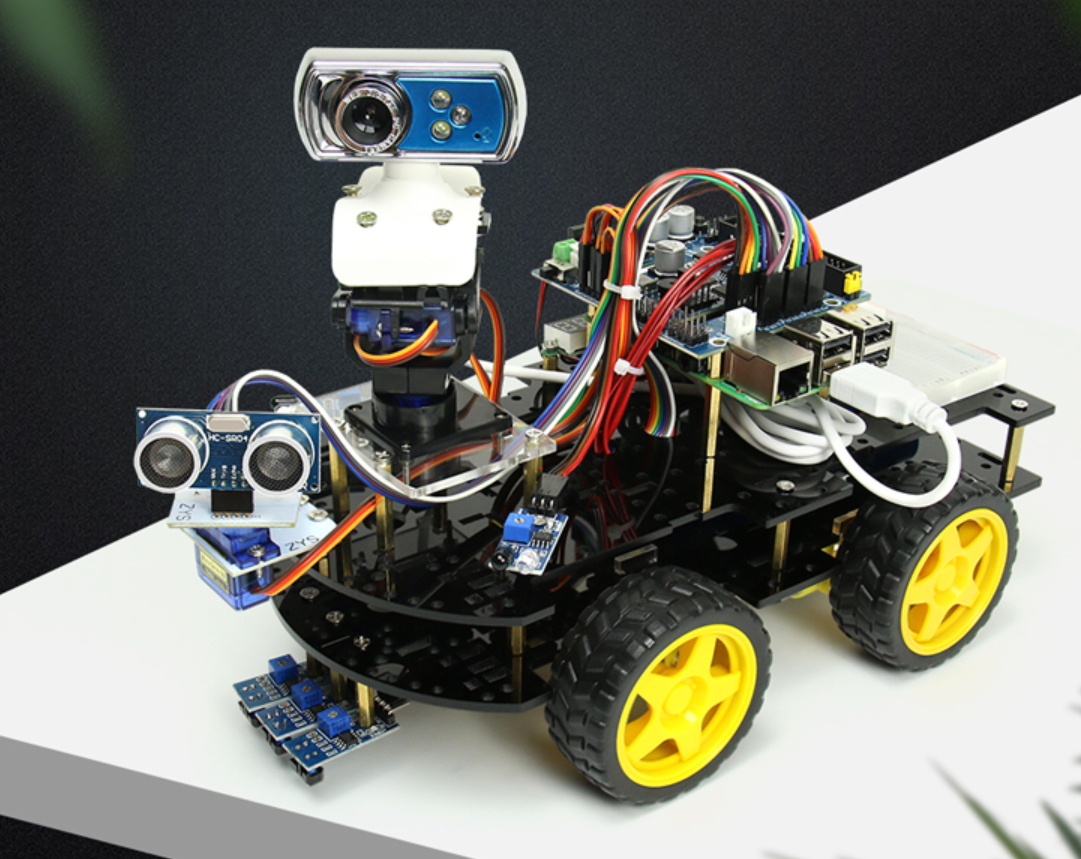
Components include:
1. Trolley bottom plate (2), motor (4), wheel (4), DuPont wire, copper column and several screws
2. Ultrasonic sensor (1) + steering gear (1)
3. Tracking sensor (3)
4. Obstacle avoidance sensors (2, left and right)
5. USB camera (1) + steering gear (2)
6. Raspberry pie 4B main control board (2G version) (1)
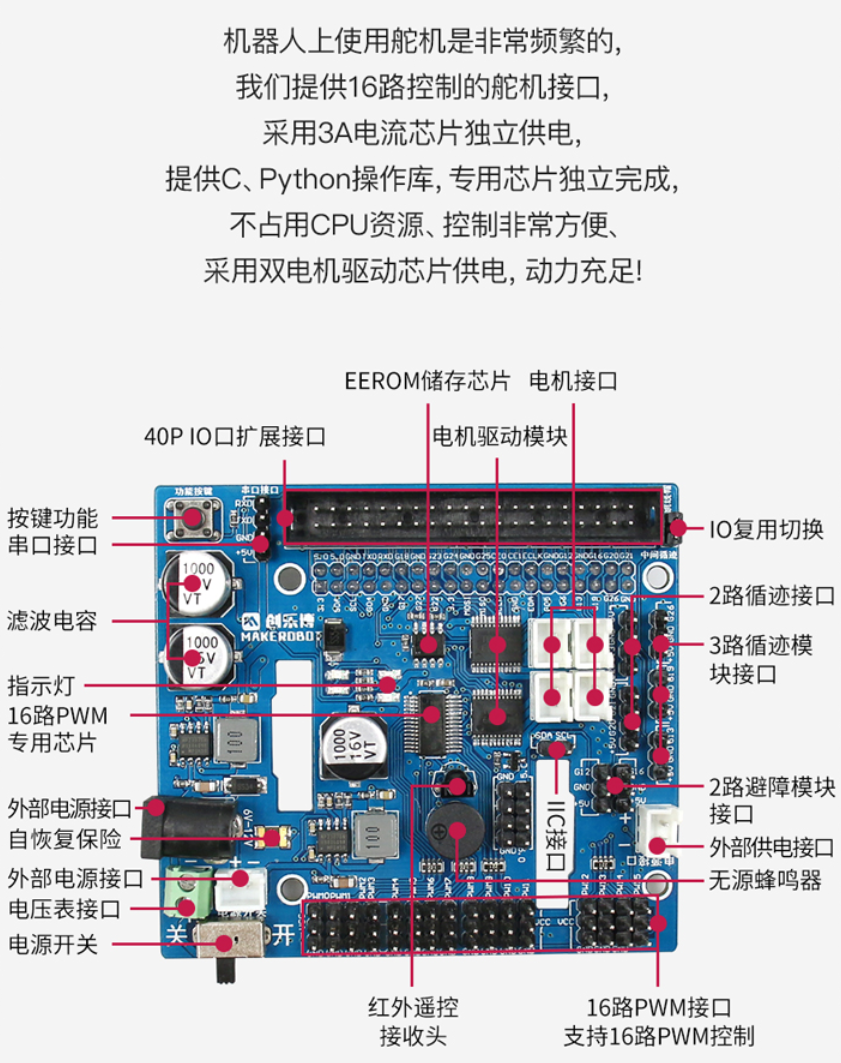
7. Raspberry pie expansion board (1)
8. Battery (1)
9. Voltage display module (1)
I finally bought a set and spent 620 yuan. If I buy it in bulk, the price is estimated as follows:
1. One set of trolley bottom plate: 35 yuan
2. Ultrasonic + 1 steering gear + small parts: 30 yuan
3. Tracking sensor: 15 yuan
4. Obstacle avoidance sensor: 5 yuan
5. USB camera + 2 steering gear: 50 yuan
6. Raspberry pie expansion board (2G version): 320 yuan
7. Battery: 20 yuan
8. Voltage display module: 5 yuan
9. Raspberry pie expansion board: 140 yuan
10. One set of electronic course: 0 yuan
Total: 620 yuan.
In other words, the store earned a profit from selling spare parts and expansion boards made by its own factory, but did not earn integration fees.
It is suggested that the most economical way is to buy package B. raspberry pie is not compatible with any USB camera, so you need to buy a package B camera, which is completely unnecessary for C and D. other sensors can be bought in the future. In addition, if you want to save money, you can buy a main control board without raspberry pie 4B and a main control board of raspberry pie ZeroWH, which can save 200 yuan, which is enough for the car to achieve performance.

2, Function point code
2.1. Four wheel motor drive module (the main program will call)
2.1.1 principle
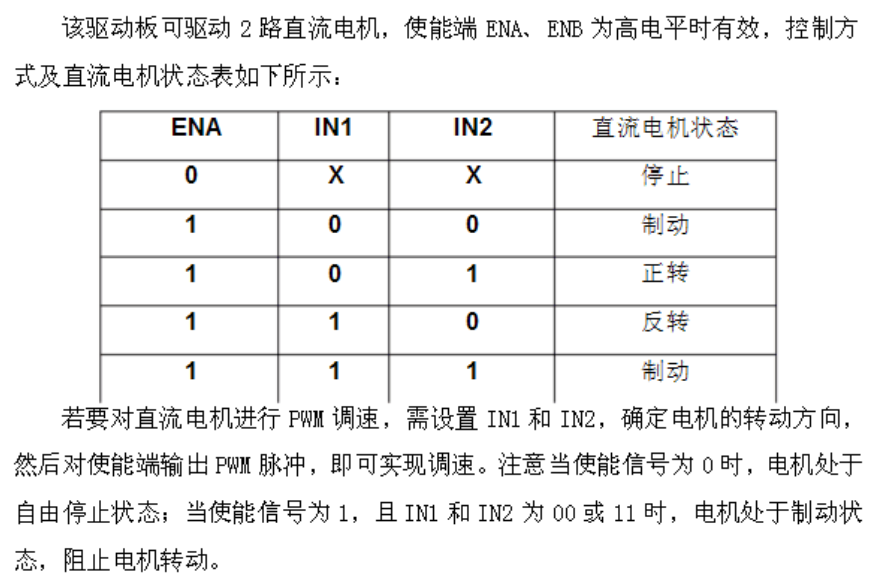
In fact, the raspberry pie integrated expansion board integrates two L298N motor drive chips. Refer to spare parts, and its working principle is as follows:
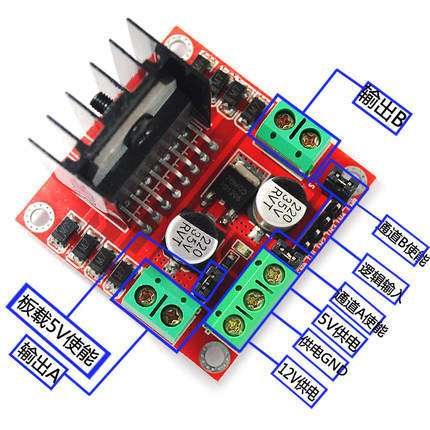
The simple point is that ENA and ENB control the wheel speed, and IN1 and IN2 control the wheel state (forward rotation, reverse rotation and stop). Output A and output B in the figure above supply power to the wheel motor respectively.
2.1.2 code
#CarMotor.py
import RPi.GPIO as GPIO
import asyncio
class SingleMotor:
def __init__(self, IN1, IN2, PWM=None):
self.speed = 35
self.freq = 50
self.run_state = "stop"
self.PWM = PWM
self.IN1 = IN1
self.IN2 = IN2
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
self.Motor = None
if self.PWM != None:
GPIO.setup(PWM, GPIO.OUT)
self.Motor = GPIO.PWM(PWM, self.freq)
self.Motor.start(0)
#Set speed (0-100)
def set_speed(self, speed):
if self.Motor == None:
return
if speed > 100:
self.speed = 100
elif speed < 0:
self.speed = 0
else:
self.speed = speed
self.Motor.ChangeDutyCycle(self.speed)
def get_speed(self):
return self.speed
def inc_speed(self, v):
self.set_speed(self.speed + v)
def dec_speed(self, v):
self.set_speed(self.speed - v)
def get_run_state(self):
return self.run_state
#Forward rotation
def up(self):
self.run_state = "up"
GPIO.output(self.IN1, GPIO.HIGH)
GPIO.output(self.IN2, GPIO.LOW)
#reversal
def down(self):
self.run_state = "down"
GPIO.output(self.IN1, GPIO.LOW)
GPIO.output(self.IN2, GPIO.HIGH)
#stop it
def stop(self):
self.run_state = "stop"
GPIO.output(self.IN1, GPIO.LOW)
GPIO.output(self.IN2, GPIO.LOW)
class CarWheel:
def __init__(self, L_Motor, R_Motor):
self.L_Wheel = L_Motor
self.R_Wheel = R_Motor
self.speed = 35
self.set_speed(self.speed)
self.run_state = "stop"
def set_speed(self, speed):
if speed > 100:
self.speed = 100
elif speed < 0:
self.speed = 0
else:
self.speed = speed
self.L_Wheel.set_speed(self.speed)
self.R_Wheel.set_speed(self.speed)
def get_speed(self):
return self.speed
def inc_speed(self, v):
self.L_Wheel.inc_speed(v)
self.R_Wheel.inc_speed(v)
self.speed = self.L_Wheel.get_speed()
def dec_speed(self, v):
self.L_Wheel.dec_speed(v)
self.R_Wheel.dec_speed(v)
self.speed = self.L_Wheel.get_speed()
def get_run_state(self):
return self.run_state
def up(self):
self.run_state = "up"
self.L_Wheel.up()
self.R_Wheel.up()
def stop(self):
self.run_state = "stop"
self.L_Wheel.stop()
self.R_Wheel.stop()
def down(self):
self.run_state = "down"
self.L_Wheel.down()
self.R_Wheel.down()
#Turn the trolley to the left, control the left wheel not to move, and the right wheel can move forward
def left(self):
self.run_state = "left"
self.L_Wheel.stop()
self.R_Wheel.up()
#Turn the trolley to the right, control the right wheel not to move, and the left wheel can move forward
def right(self):
self.run_state = "right"
self.L_Wheel.up()
self.R_Wheel.stop()
async def motor_task():
L_Motor = SingleMotor(
PWM = 18,
IN1 = 22,
IN2 = 27
)
R_Motor = SingleMotor(
PWM = 23,
IN1 = 25,
IN2 = 24
)
cm = CarWheel(
L_Motor = L_Motor,
R_Motor = R_Motor
)
t_time = 2
cm.inc_speed(5)
cm.up()
await asyncio.sleep(t_time)
cm.dec_speed(5)
cm.down()
await asyncio.sleep(t_time)
cm.left()
await asyncio.sleep(t_time)
cm.right()
await asyncio.sleep(t_time)
cm.stop()
await asyncio.sleep(t_time)
async def main():
dltasks = set()
dltasks.add(asyncio.ensure_future(motor_task()))
dones, dltasks = await asyncio.wait(dltasks)
for task in dones:
print("Task ret: ", task.result())
if __name__ == '__main__':
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
loop = asyncio.get_event_loop()
loop.run_until_complete(main())
try:
loop.run_forever()
except KeyboardInterrupt:
pass
finally:
GPIO.cleanup()
2.2 ultrasonic example
#https://gpiozero.readthedocs.io/en/stable/recipes.html#distance-sensor
#DistanceSensor_t.py
from gpiozero import DistanceSensor
from time import sleep
sensor = DistanceSensor(23, 24)
while True:
print('Distance to nearest object is', sensor.distance, 'm')
sleep(1)
2.3 and 2.4G wireless handle control examples
#joystick_t.py
import asyncio
import pygame
from pygame.locals import *
async def joystick_task(self):
#JOYAXISMOTION joy, axis, value
#JOYBALLMOTION joy, ball, rel
#JOYHATMOTION joy, hat, value
#JOYBUTTONUP joy, button
#JOYBUTTONDOWN joy, button
while True:
for event in pygame.event.get():
# if event.type == pygame.JOYAXISMOTION:
# print("Joystick JOYAXISMOTION.")
# if event.type == pygame.JOYBALLMOTION:
# print("Joystick JOYBALLMOTION.")
if event.type == pygame.JOYHATMOTION:
# print("Joystick JOYHATMOTION.")
if event.value == (-1, 0):
print('left')
elif event.value == (0, 1):
print('up')
elif event.value == (0, -1):
print('down')
elif event.value == (1, 0):
print('right')
elif event.value == (0, 0):
print('stop')
else:
print(event.value)
elif event.type == pygame.JOYBUTTONDOWN:
print("Joystick JOYBUTTONDOWN.")
if joystick.get_button(0) == 1:
print('button[Y]')
elif joystick.get_button(1) == 1:
print('button[B]')
elif joystick.get_button(2) == 1:
print('button[A]')
elif joystick.get_button(3) == 1:
print('button[X]')
else:
pass
elif event.type == pygame.JOYBUTTONUP:
print("Joystick JOYBUTTONUP.")
else:
pass
await asyncio.sleep(0.1)
async def main():
pygame.init()
pygame.joystick.init()
# Get count of joysticks
joystick_count = pygame.joystick.get_count()
print("Number of joysticks: {0}".format(joystick_count))
joystick0 = pygame.joystick.Joystick(0)
joystick.init()
dltasks = set()
dltasks.add(asyncio.ensure_future(joystick_task()))
dones, dltasks = await asyncio.wait(dltasks)
for task in dones:
print("Task ret: ", task.result())
if __name__ == '__main__':
loop = asyncio.get_event_loop()
loop.run_until_complete(main())
try:
loop.run_forever()
except KeyboardInterrupt:
pass
finally:
pygame.quit()
2.4 network services
#See main program
2.5. Steering gear module (the main program will call)
#CarServo.py
import Adafruit_PCA9685
import RPi.GPIO as GPIO
import time
class CarServo:
def __init__(self):
#2 camera steering gear, 1 ultrasonic steering gear
self.pwm_pca9685 = Adafruit_PCA9685.PCA9685()
self.pwm_pca9685.set_pwm_freq(50)
self.servo = {}
self.set_servo_angle(0, 110)
self.set_servo_angle(1, 100)
self.set_servo_angle(2, 20)
#The input angle is converted to a value of 12 ^ accuracy
def set_servo_angle(self, channel, angle):
if (channel >= 0) and (channel <= 2):
new_angle = angle
if angle < 0:
new_angle = 0
elif angle > 180:
new_angle = 180
else:
new_angle = angle
print("channel={0}, angle={1}".format(channel, new_angle))
#date=4096*((new_angle*11)+500)/20000#Perform rounding operation date=int(4096*((angle*11)+500)/(20000)+0.5)
date = int(4096*((new_angle*11)+500)/(20000)+0.5)
self.pwm_pca9685.set_pwm(channel, 0, date)
self.servo[channel] = new_angle
else:
print("set_servo_angle error. servo[{0}] = [{1}]".format(channel, angle))
def inc_servo_angle(self, channel, v):
self.set_servo_angle(channel, self.servo[channel] + v)
def dec_servo_angle(self, channel, v):
self.set_servo_angle(channel, self.servo[channel] - v)
if __name__ == '__main__':
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
cs = CarServo()
cs.inc_servo_angle(0, 10)
cs.inc_servo_angle(1, 10)
cs.inc_servo_angle(2, 10)
time.sleep(2)
cs.dec_servo_angle(0, 10)
cs.dec_servo_angle(1, 10)
cs.dec_servo_angle(2, 10)
time.sleep(2)
GPIO.cleanup()
2.6 example of USB camera
#See main program
2.7 example of infrared obstacle avoidance
import RPi.GPIO as GPIO
import time
pin_avoid_obstacle=18
GPIO.setmode(GPIO.BCM)
GPIO.setup(pin_avoid_obstacle, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
try:
while True:
status = GPIO.input(pin_avoid_obstacle)
if status == TRUE:
print('I am an infrared obstacle avoidance module. No obstacles are detected. Everything is normal!')
else:
print('I'm an infrared obstacle avoidance module. If an obstacle is detected, pay attention to parking')
time.sleep(0.5)
except KeyboradInterrupt:
pass
finally:
GPIO.cleanup()
2.8 example of tracking module
#I don't want to put a black line on the ground floor of my home for the time being, so I didn't write this code
3, Trolley complete code
#ppycar.py
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import asyncio
import aiohttp
import websockets
import json
import time
import logging
import threading
import sys
import cv2
from aiohttp import web
from concurrent.futures import ThreadPoolExecutor
import RPi.GPIO as GPIO
import pygame
from pygame.locals import *
from CarMotor import CarWheel, SingleMotor
from gpiozero import DistanceSensor
#from CarDistance import CarDistance
from CarServo import CarServo
class CwCar:
def __init__(self):
#Left front and rear wheels (circuit ensures consistent action)
L_Motor = SingleMotor(
PWM = 18,
IN1 = 22,
IN2 = 27
)
#Right front and rear wheels (circuit ensures consistent action)
R_Motor = SingleMotor(
PWM = 23,
IN1 = 25,
IN2 = 24
)
#Trolley
self.cm = CarWheel(
L_Motor = L_Motor,
R_Motor = R_Motor
)
#Ultrasonic ranging
#self.cd = CarDistance(
# GPIO_TRIGGER = 20,
# GPIO_ECHO = 21
# )
self.sensor = DistanceSensor(21, 20)
#2 camera steering gear, 1 ultrasonic steering gear
self.cs = CarServo()
#Thread pool, used to encapsulate non co process objects
self.__executor = ThreadPoolExecutor(10)
self.__loop = asyncio.get_event_loop()
self.cap = cv2.VideoCapture(0)
self.jpg_bytes = None
#Blocking function call encapsulation of non concurrent objects
async def ThreadRun(self, func, *args,**kwargs):
return await self.__loop.run_in_executor(self.__executor, func, *args,**kwargs)
#Regularly update the obstacle distance measured by ultrasound
async def distance_task(self, update_time):
print("distance_task start")
while True:
dist_float = self.sensor.distance
dist = int(dist_float * 100)
#When the distance is less than 40cm and the running state is forward, the trolley stops running
if (dist < 80) and (self.cm.get_run_state() == 'up'):
self.cm.stop()
await asyncio.sleep(update_time)
print("distance_task end")
#Handle command controls trolley operation
async def joystick_task(self):
joystick = pygame.joystick.Joystick(0)
joystick.init()
while True:
for event in pygame.event.get():
#The up, down, left and right keys on the left of the handle control the operation of the trolley
if event.type == pygame.JOYHATMOTION:
if event.value == (-1, 0):
print('left')
self.cm.left()
elif event.value == (0, 1):
print('up')
dist_float = self.sensor.distance
dist = int(dist_float * 100)
if dist > 80:
self.cm.up()
elif event.value == (0, -1):
print('down')
self.cm.down()
elif event.value == (1, 0):
print('right')
self.cm.right()
elif event.value == (0, 0):
print('stop')
self.cm.stop()
else:
print(event.value)
#Control trolley speed
elif event.type == pygame.JOYBUTTONDOWN:
print("Joystick JOYBUTTONDOWN.")
if joystick.get_button(0) == 1:
print('button[Y]')
elif joystick.get_button(1) == 1:
print('button[B]')
self.cm.inc_speed(5)
elif joystick.get_button(2) == 1:
print('button[A]')
elif joystick.get_button(3) == 1:
print('button[X]')
self.cm.dec_speed(5)
#Control camera steering gear
elif joystick.get_button(4) == 1:
print('button[4]')
self.cs.inc_servo_angle(1, 5)
elif joystick.get_button(5) == 1:
print('button[5]')
self.cs.dec_servo_angle(1, 5)
elif joystick.get_button(6) == 1:
print('button[6]')
self.cs.inc_servo_angle(2, 5)
elif joystick.get_button(7) == 1:
print('button[7]')
self.cs.dec_servo_angle(2, 5)
else:
pass
await asyncio.sleep(0.1)
#Receive the car control command sent from the remote web page
async def car_recv_msg(self, ws, msg):
response_ojb = {
"cmd" : "None",
"ret" : 0,
"errinfo": ""
}
try:
recv_text = msg.data
recv_json_obj = json.loads(recv_text)
print(recv_json_obj)
cmd = recv_json_obj['cmd']
response_ojb['cmd'] = cmd
print("cmd = {0}".format(cmd))
if cmd == "stop":
self.cm.stop()
elif cmd == "up":
dist = int(await self.ThreadRun(self.cd.distance))
if dist > 80:
self.cm.up()
elif cmd == "down":
self.cm.down()
elif cmd == "left":
self.cm.left()
elif cmd == "right":
self.cm.right()
elif cmd == "inc":
self.cm.inc_speed(5)
speed = self.cm.get_speed()
response_ojb["speed"] = speed
elif cmd == "dec":
self.cm.dec_speed(5)
speed = self.cm.get_speed()
response_ojb["speed"] = speed
else:
print("cmd error")
except Exception as e:
print("recv json error:{0}:{1}:{2}" .format(
e.__traceback__.tb_frame.f_globals["__file__"],
e.__traceback__.tb_lineno,
e))
response_ojb["ret"] = 1
response_ojb["errorinfo"] = "recv json error"
response_json = json.dumps(response_ojb)
await ws.send_str(response_json)
#Analysis of websocket receiving message protocol
async def websocket_car_handler(self, request):
print('websocket_car_handler start...')
ws = web.WebSocketResponse()
await ws.prepare(request)
while not ws.closed:
msg = await ws.receive()
if msg.type == aiohttp.WSMsgType.text:
await self.car_recv_msg(ws, msg)
elif msg.type == aiohttp.WSMsgType.close:
print('websocket connection closed')
elif msg.type == aiohttp.WSMsgType.error:
print('ws connection closed with exception {0}'.format(ws.exception()))
else:
await ws.send_str('websocket_car_handler')
return ws
#Return camera image data to the request page
async def websocket_webcam_handler(self, request):
print('websocket_webcam_handler start...')
ws = web.WebSocketResponse()
await ws.prepare(request)
while not ws.closed:
msg = await ws.receive()
if msg.type == aiohttp.WSMsgType.text:
print(msg.data, end='')
if self.jpg_bytes != None:
await ws.send_bytes(self.jpg_bytes)
elif msg.type == aiohttp.WSMsgType.close:
print('websocket connection closed')
elif msg.type == aiohttp.WSMsgType.error:
print('ws connection closed with exception {0}'.format(ws.exception()))
else:
await ws.send_str('websocket_webcam_handler')
return ws
#Regularly collect camera image data
async def webcam_read_task(self):
print("{0}:{1}".format("webcam_read_task", "start"))
encode_param = [int(cv2.IMWRITE_JPEG_QUALITY), 50]
while True:
await self.ThreadRun(self.__webcam_read, encode_param)
await asyncio.sleep(0.05)
print("{0}:{1}".format("webcam_read_task", "end"))
#Camera image data acquisition
def __webcam_read(self, encode_param):
ret, frame = self.cap.read()
ret, jpg = cv2.imencode('.jpg', frame, encode_param)
self.jpg_bytes = jpg.tobytes()
async def main(main_loop):
cc = CwCar()
local_ip = '0.0.0.0'
local_port = 5678
app = web.Application()
app.router.add_route('GET', '/ppycar', cc.websocket_car_handler)
app.router.add_route('GET', '/sendframe', cc.websocket_webcam_handler)
app.router.add_static('/static', path='webroot', show_index=True)
runner = web.AppRunner(app)
await runner.setup()
site = web.TCPSite(runner, local_ip, local_port)
print("MainLoop:Server started at http://{0}...:{1}".format(local_ip, local_port))
dltasks = set()
dltasks.add(asyncio.ensure_future(cc.joystick_task())) #Handle control
dltasks.add(asyncio.ensure_future(site.start())) #websockets web page control
dltasks.add(asyncio.ensure_future(cc.webcam_read_task())) #Timing camera image data acquisition
dltasks.add(asyncio.ensure_future(cc.distance_task(update_time = 0.05)))#Timing ultrasonic ranging
dones, dltasks = await asyncio.wait(dltasks)
for task in dones:
print("Main Task ret: ", task.result())
if __name__ == '__main__':
pygame.init()
pygame.joystick.init()
joystick_count = pygame.joystick.get_count()
print("Number of joysticks: {0}".format(joystick_count))
#Make sure there is and only one handle control
if joystick_count != 1:
print("joystick_count < 1, sys.exit.")
GPIO.cleanup()
pygame.quit()
sys.exit()
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
main_loop = asyncio.get_event_loop()
main_loop.run_until_complete(main(main_loop))
try:
main_loop.run_forever()
except KeyboardInterrupt:
pass
finally:
GPIO.cleanup()
pygame.quit()
4, Web page control complete code
ppy_car_web.html
<!DOCTYPE html>
<html lang="zh-cmn-Hans">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width,initial-scale=1,user-scalable=0,viewport-fit=cover">
<title>Trolley remote control</title>
<link rel="stylesheet" href="https://res.wx.qq.com/open/libs/weui/2.4.4/weui.css"/>
<script type="text/javascript">
let ws;
let wsurl = "ws://" + window.location.hostname + ":5678/ppycar"
//let wsurl = "ws://192.168.3.128:5678/ppycar"
let speed = 35;
function car_cmd(car_cmd_json){
let jsonText = JSON.stringify(car_cmd_json);
console.log(jsonText);
if (ws.readyState == 1){
ws.send(jsonText);
}else{
console.log("ws.readyState = " + ws.readyState)
}
}
function car_speed(cmd){
car_cmd({cmd: cmd})
}
function car_move(cmd){
car_cmd({cmd: cmd})
}
function car_distance(){
car_cmd({cmd: 'distance'})
}
function ws_conn(){
ws = new WebSocket(wsurl);
console.log("ws_conn.");
ws.onopen = function()
{
console.log("do_ws_open.");
};
ws.onmessage = function (evt)
{
let received_msg = evt.data;
console.log("recv info:" + received_msg);
let obj = JSON.parse(received_msg)
if((obj.cmd == 'inc') || (obj.cmd == 'dec')){
document.getElementById("car_speed").innerHTML = obj.speed + "(Interval: 0-100)";
}
};
ws.onclose = function()
{
console.log("ws close.");
};
}
function ws_close(){
console.log("do_ws_close.");
ws.close();
}
</script>
<script>
let webcam_wsurl = "ws://" + window.location.hostname + ":5678/sendframe"
let socket = new WebSocket(webcam_wsurl);
let img = new Image();
function sendMsg() {
socket.send("update");
console.log("socket: send update");
}
function Uint8ToString(u8a) {
var CHUNK_SZ = 0x8000;
var c = [];
for (var i = 0; i < u8a.length; i += CHUNK_SZ) {
c.push(String.fromCharCode(...u8a.subarray(i, i + CHUNK_SZ)));
}
return c.join("");
}
function drawFrame(frame) {
var uint8Arr = new Uint8Array(frame);
var str = Uint8ToString(uint8Arr);
var base64String = btoa(str);
img.onload = function () {
context.drawImage(this, 0, 0, canvas.width, canvas.height);
};
img.src = "data:image/png;base64," + base64String;
}
socket.onopen = () => {
console.log("socket: connected");
};
socket.onmessage = (msg) => {
msg.data.arrayBuffer().then((buffer) => {
drawFrame(buffer);
console.log("socket: frame updated");
});
};
</script>
</head>
<body onload="ws_conn();">
<div class="page">
<div class="weui-form">
<div class="weui-form__text-area">
<h2 class="weui-form__title">Trolley remote control</h2>
</div>
<div class="weui-cells weui-cells_form">
<div class="weui-cell">
<div class="weui-cell__bd">
</div>
<div class="weui-cell__bd">
<button class="weui-btn weui-btn_primary" onclick="car_move('up');" id="car_up">forward</button>
</div>
<div class="weui-cell__bd">
</div>
</div>
<div class="weui-cell">
<div class="weui-cell__bd">
<button class="weui-btn weui-btn_primary" onclick="car_move('left');" id="car_left">Turn left</button>
</div>
<div class="weui-cell__bd">
<button class="weui-btn weui-btn_primary" onclick="car_move('down');" id="car_down">back off</button>
</div>
<div class="weui-cell__bd">
<button class="weui-btn weui-btn_primary" onclick="car_move('right');" id="car_right">Turn right</button>
</div>
</div>
<div class="weui-cell">
<div class="weui-cell__bd">
<button class="weui-btn weui-btn_primary" onclick="car_speed('dec');" id="speed_dec">Slow down</button>
</div>
<div class="weui-cell__bd">
<button class="weui-btn weui-btn_primary" onclick="car_speed('inc');" id="speed_inc">accelerate</button>
</div>
<div class="weui-cell__bd">
<button class="weui-btn weui-btn_primary" onclick="car_move('stop');" id="cat_stop">stop it</button>
</div>
</div>
</div>
<div class="weui-form__text-area">
<h2 class="weui-form__title">Trolley data acquisition</h2>
</div>
<div class="weui-cells">
<div class="weui-cell weui-cell_example">
<div class="weui-cell__hd"><i class="weui-icon-waiting weui-icon_msg"></i></div>
<div class="weui-cell__bd">
<p>Trolley Speed</p>
</div>
<div class="weui-cell__ft" id="car_speed">35(0-100)</div>
</div>
<div class="weui-cell weui-cell_example">
<div class="weui-cell__hd"><i class="weui-icon-waiting weui-icon_msg"></i></div>
<div class="weui-cell__bd">
<p>Ultrasonic distance</p>
</div>
<div class="weui-cell__ft">0(Mm)</div>
</div>
</div>
<div class="weui-form__text-area">
<h2 class="weui-form__title">Car camera</h2>
</div>
<div class="weui-cells" align="center">
<canvas id="canvas-video" width="512" height="384"></canvas>
</div>
<script>
const canvas = document.getElementById("canvas-video");
const context = canvas.getContext("2d");
// show loading notice
context.fillStyle = "#333";
context.fillText("Loading...", canvas.width / 2 - 30, canvas.height / 3);
setInterval(() => {
socket.send("x");
}, 100);
</script>
</div>
</div>
</body>
</html>