Robot introduction
The robot consists of four parts: control system (brain), sensing system (eyes), driving system (muscle) and execution system (hand).
Sensor input signal, the control system receives and releases the control command, drives the control command into a signal that can be executed by the execution system, and the execution system executes.
modeling
URDF unified Robot Description Format - unified robot format. ROS can parse the robot model described in XML format in URDF file.
In URDF file, the components of robot can be roughly divided into two categories: joint and link.
link describes the appearance and physical properties of a rigid body: appearance parameters: size, color, shape. Inertia parameter: inertia matrix. Collision attributes: collision parameters.
Joint describes the kinematic and dynamic properties of a joint, including the position and speed limits of the joint. It can be divided into six categories: continuous, revolve, prismatic, planar, floating and fixed. They all have their own scope of use. In particular, continuous rotating joints are unrestricted, and wheels and revolve are restricted. These two types are often used.
Create a functional package for robot modeling - implement a simple URDF model:
catkin_create_pkg mbot_description urdf xacro
Robot name_ description is a conventional model file representing the robot, which is dependent on two function packages.
No longer in a feature pack cpp files, all folders. Create four folders: urdf (specific model file for placing the robot), meshes (appearance texture file for placing the robot), create a launch folder to start, and a config folder to configure.
(1) Write display under the luanch folder_ mbot_ base_ urdf. Launch is used for more convenient startup.
<launch> <param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_base.urdf" /> <!-- set up GUI Parameters, display joint control plug-in --> <param name="use_gui" value="true"/> <!-- function joint_state_publisher Node to publish the joint state of the robot --> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> <!-- function robot_state_publisher Nodes, publishing tf --> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" /> <!-- function rviz Visual interface --> <node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" /> </launch>
(2) Create mBot under urdf folder_ base. The urdf file (the model of the base) is used for modeling.
In the experiment, you can adjust the parameters to see what changes there are to promote the understanding of the significance of each parameter.
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
</robot>
(3) Configure rviz in the config folder and create mBot The rviz configuration files are all in the fixed format of rviz and do not need to be understood.
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /TF1
Splitter Ratio: 0.5
Tree Height: 473
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679016
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: ""
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.0299999993
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
back_castor_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_footprint:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
front_castor_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
left_wheel_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
right_wheel_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
- Class: rviz/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: true
back_castor_link:
Value: true
base_footprint:
Value: true
base_link:
Value: true
front_castor_link:
Value: true
left_wheel_link:
Value: true
right_wheel_link:
Value: true
Marker Scale: 0.100000001
Name: TF
Show Arrows: true
Show Axes: true
Show Names: true
Tree:
base_footprint:
base_link:
back_castor_link:
{}
front_castor_link:
{}
left_wheel_link:
{}
right_wheel_link:
{}
Update Interval: 0
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: base_footprint
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 0.86167258
Enable Stereo Rendering:
Stereo Eye Separation: 0.0599999987
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: -0.0422003381
Y: -0.00756526971
Z: 0.119616583
Focal Shape Fixed Size: true
Focal Shape Size: 0.0500000007
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.00999999978
Pitch: 0.265398145
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 0.650397897
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 754
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000016a00000268fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006100fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000002800000268000000d700fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f00000242fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000002800000242000000ad00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004a70000003efc0100000002fb0000000800540069006d00650100000000000004a70000030000fffffffb0000000800540069006d00650100000000000004500000000000000000000003370000026800000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1191
X: 276
Y: 84
This is the creation of the most basic base model. The summary is the urdf file of the base, the configuration file of rviz, and the launch file of loading the base and rviz.
Compile catkin in a large folder_ Make, and then load the path source/ devel/setuo. bash.
Using launch mbot_description display_mbot_base_urdf.launch starts.
The effect is shown in the figure:
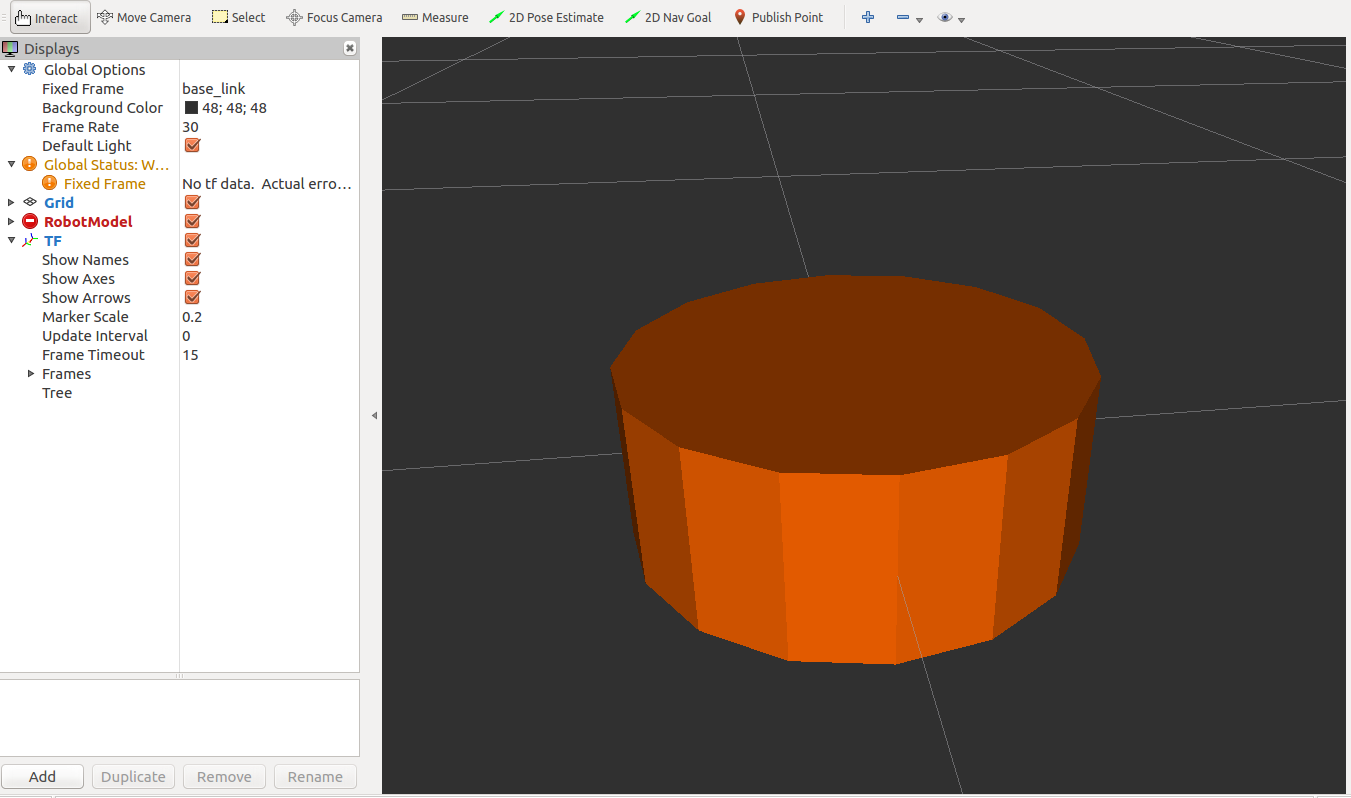
If you want other rigid bodies or joints, you can add them yourself.
In particular, kinect texture description files can be used. Loading with mesh tags can achieve the effect of restoring the real object. Place kinect files in the meshes folder, modify the urdf file, and load kinect into our model. The path must be correct.
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<origin xyz="0.15 0 0.11" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="kinect_link"/>
</joint>
The path of the corresponding launch file should also be modified, as shown in the figure below:

This section only creates the appearance model of the robot, and the cameras are just an empty box, which has no practical significance. It is mainly about the use of urdf files and the path of launch files. Note that there will be no problems in other places.
be accomplished!!!