Memory reading and writing experiment:
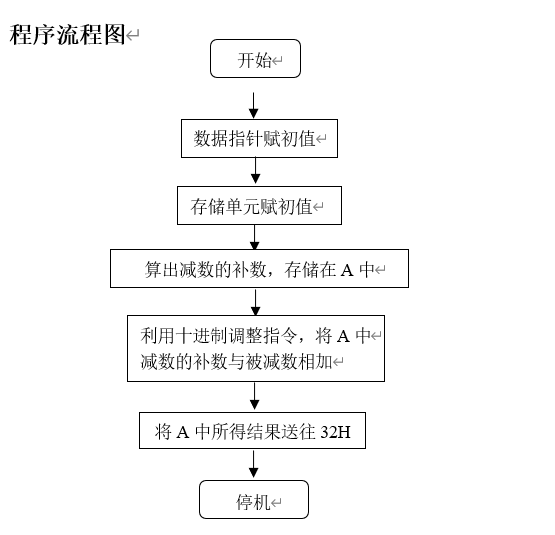
Assign BCD codes 75H and 35H to 30H and 31H units of RAM respectively, try to add the two numbers, and the difference of BCD is sent to 32H unit.
(description):
Because the decimal adjustment instruction of MCS-51 is not suitable for subtraction, subtraction can be changed into addition: the subtraction subtraction is changed into the complement of subtraction + subtraction, where the complement of subtraction = the modulus subtraction of BCD code. Finally, the decimal addition instruction is used to send the complement of subtracted + subtracted to memory A and then store it in 32H unit.
(flow chart):
ORG 0000H LJMP START ORG 0020H START: MOV R0,#30H MOV R1,#31H MOV 30H,#72H MOV 31H,#35H MOV A,#9AH SUBB A,@R1 ADD A,@R0 DA A MOV 32H,A SJMP $ END
Parallel port experiment:
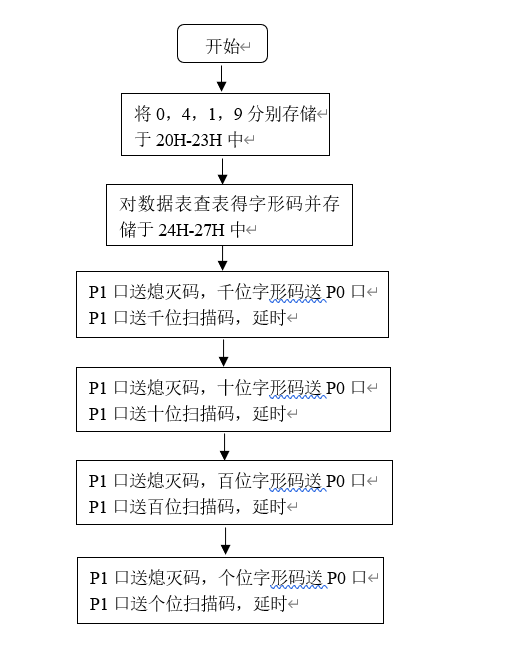
Using the two interfaces of single chip microcomputer to drive the four in one LED nixie tube circuit, it is required to directly display "0, 4, 1, 9" in RAM20H-23H from right to left on the nixie tube.
(description):
The data variable to be displayed is stored in 20H-23H of RAM, and the corresponding font code is stored in 24H-27H of RAM. The font code corresponding to the variable is obtained by looking up the table. According to the characteristics of the circuit, the bit driving level is low and effective. The DELAY of the subroutine DELAY determines the lighting time of each nixie tube. The DELAY time can be increased by modifying the DELAY parameters in DELAY, so as to observe the effect of dynamic display.
(flow chart):
ORG 0000H LJMP START ORG 0030H START: MOV SP,#60H MOV A,#00H MOV R0,#20H MOV @R0,A MOV A,#4 INC R0 MOV @R0,A INC R0 MOV A,#1 MOV @R0,A INC R0 MOV A,#9 MOV @R0,A MOV R0,#20H MOV R1,#24H MOV R2,#4 MOV DPTR,#LEDGY LOOP1: MOV A,@R0 MOVC A,@A+DPTR MOV @R1,A INC R0 INC R1 DJNZ R2,LOOP1 LOOP2: MOV P1,#0FFH MOV P0,24H MOV P1,#0EFH LCALL DELAY MOV P1,#0FFH MOV P0,25H MOV P1,#0DFH LCALL DELAY MOV P1,#0FFH MOV P0,26H MOV P1,#0BFH LCALL DELAY MOV P1,#0FFH MOV P0,27H MOV P1,#07FH LCALL DELAY SJMP LOOP2 LEDGY: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H DB 80H,90H,88H,83H,0C6H,0A1H,86H,8EH DELAY PUSH 00H PUSH 01H MOV R1,#00H LOOP3: MOV R0,#06H DJNZ R0,$ DJNZ R1,LOOP3 POP 01H POP 00H RET END
External interrupt test:
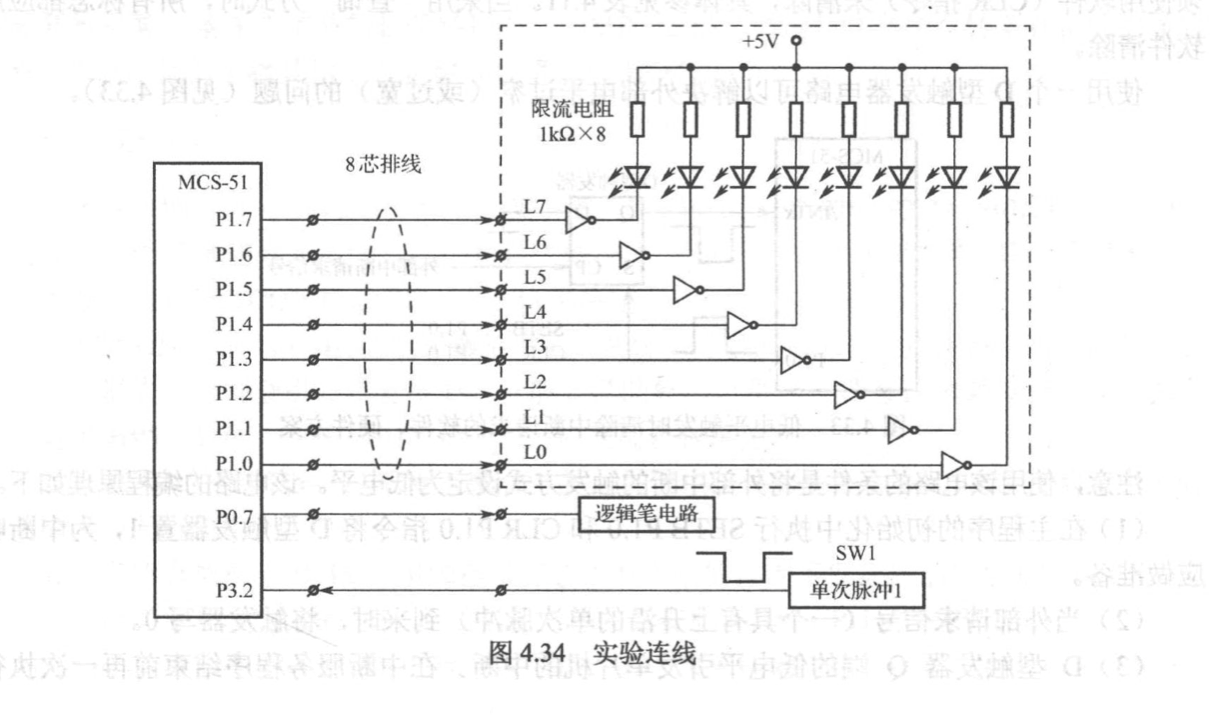
Design a counter, use the interrupt program to complete the function of displaying it every five times, and the counter is initially cleared. Use the "logic pen" circuit to display P0 7 status: if P0.05 If the level of 7 changes continuously, it indicates that the system is executing the main program without interruption; If P0.05 7 becomes a fixed high level, indicating that the system enters an interrupt.
(description):
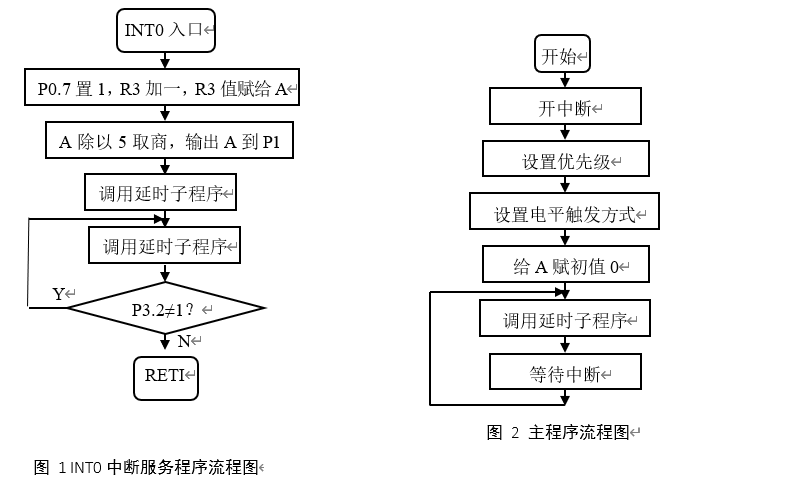
Set / INT0 interrupt entry, and set P0 in the interrupt service program 7 is set to 1. In the interrupt program, every time an interrupt is accepted, add one to R3 and transfer the data in R3 to A. divide a by 5 to detect whether the interrupt is accepted for five times. When it is reached, add the counter and display it together. A delay program is added for software anti shake every time the reading is interrupted.
(circuit diagram):
(flow chart):
ORG 0000H LJMP START ORG 0003H LJMP INT_0 ORG 0030H START: MOV SP,#60H MOV TCON,#00H MOV R3,#00H MOV A,R3 SETB EX0 ; SETB EA ;Allow interrupt LOOP1: MOV P1,A CPL P0.7 LCALL DELAY SJMP LOOP1 INT_0: PUSH PSW SETB P0.7 INC R3 MOV A,R3 MOV B,#5 DIV A B MOV P1,A LCALL DELAY JNB P3.2,$ LCALL DELAY POP PSW RETI DELAY: PUSH 01H PUSH 02H MOV R4,#12H LOOP2: NOP DJNZ R4,LOOP2 MOV R1,#00H DELAY1: MOV R2,#00H DJNZ R2,$ DJNZ R1,DELAY1 POP 02H POP 01H RET END
Timing counter experiment:
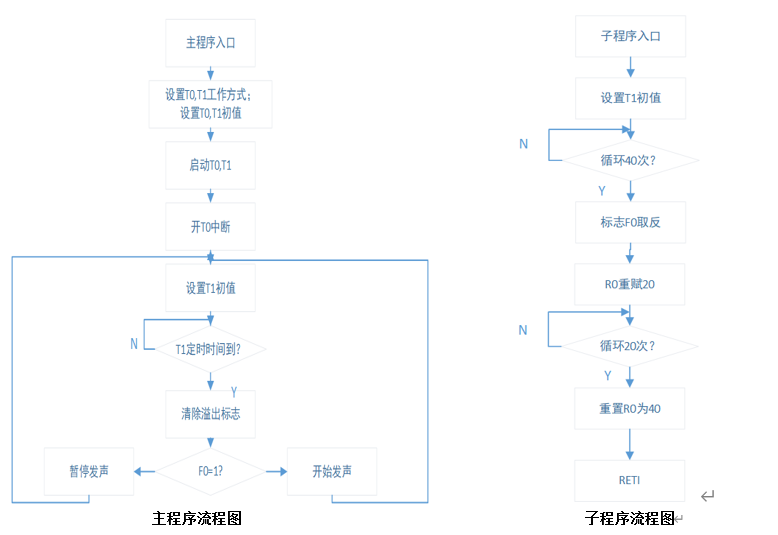
T0 and T1 are respectively used to realize the procedure that the buzzer whistles at the frequency of 1Khz for 2s, stops for 1s and makes sound circularly.
(description):
Use the timer / counter T1 and query method to set the initial value 0FE33H and control the sound frequency of 1KHZ; Using the timer / counter T0 and the interrupt method, set the initial value 4BFCH, interrupt once every 50MS, and use the cycle to achieve the second timing effect of timing 2s and stopping 1s.
(circuit diagram):

(flow chart):
ORG 0000H LJMP START ORG 000BH LJMP INT_0 ORG 0030H START: MOV SP,#60H MOV TMOD,#11H ; Both T0 and T1 work in mode 1 MOV TL0,#0FCH MOV TH0,#4BH ; T0 sets the initial value 4BFCH and interrupts once every 50MS MOV TL1,#033H MOV TH1,#0FEH ; T1 sets the initial value 0FE33H and controls the sound frequency of 1KHZ SETB TR1 SETB TR0 SETB EA SETB ET0 MOV A,#00H MOV R0,#forty ; 40 cycles LOOP: CJNE A,#00H,DOWN JNB TF1,$ ;Use query method CLR TF1 MOV TL1,#033H MOV TH1,#0FEH JB F0,DOWN CPL P1.1 DOWN: SJMP LOOP INT_0: PUSH PSW ;Use interrupt method MOV TL0,#0FCH MOV TH0,#4BH DJNZ R0,EXIT MOV R0,#twenty ; Cycle 20 times CJNE A,#00H,TURN MOV A,#01H SJMP EXIT TURN: MOV A,#00H MOV R0,#40 EXIT: POP PSW RETI END
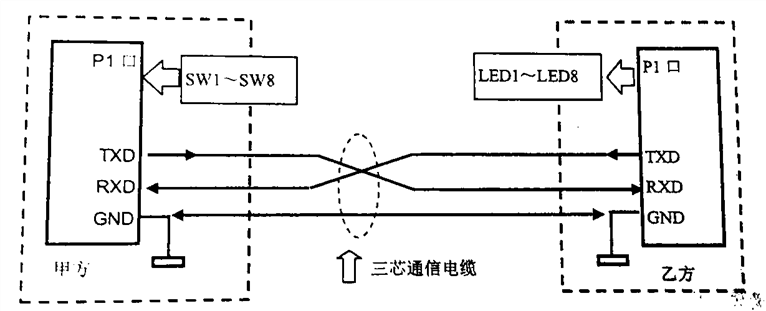
TLC549 serial AD conversion experiment and serial port experiment
Connect LED 1 ~ LED8 with P1 port in order to display the data received from the serial port. When the data received by the serial port is FF0FH, all the lights are on; When the data received by the serial port is FF00H, all the lights are off; When the serial port accepts data as other data, it maintains the previous data state.
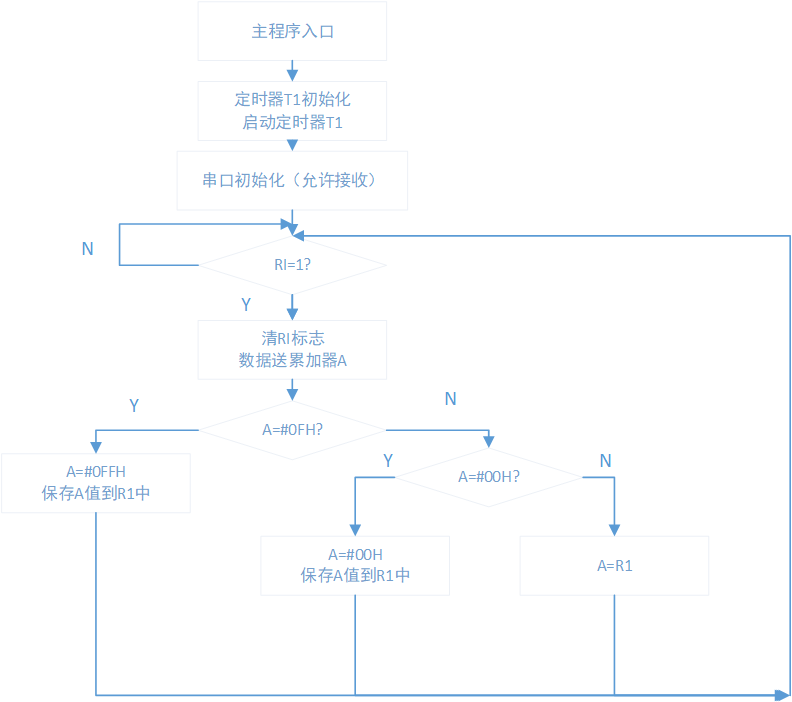
(description):
Timer T1 works in mode 2, sets the initial baud rate to 9600HZ, clears the flag after receiving the data, first judges whether the data is 0FH, if so, assigns 0FFH to A and outputs it to make the lamp fully on; If not, judge whether it is 00H. If so, assign 00H to A and output it to turn off all the lights. If not, output the last saved R1 value to keep the lights as they are.
(circuit diagram):
(flow chart):
ORG 0030H START: MOV TMOD,#20H MOV TL1,#0FDH ; Initial value of sending timing MOV TH1,#0FDH MOV PCON,#00H SETB TR1 CLR RI MOV SCON,#50H ; Serial interface mode 1 (acceptable) LOOP1: JNB RI,LOOP1 ;Judge whether data is received CLR RI ;Clear the accept flag after receiving data MOV A,SBUF ;Data transmission accumulator A CJNE A,#0FH,ZERO ; Determine whether it is the maximum value MAX: MOV A,#0FFH ; Assign 0ffh to A MOV R1,A MOV P1,A ;from P1 Port output SJMP LLL ZERO: CJNE A,#00H,DOWN ; Judge whether it is 0 MOV A,#00H ;towards A Fu#00H MOV R1,A MOV P1,A SJMP LLL DOWN: MOV A,R1 ;If the input data is other values, the previous data will be maintained MOV P1,A SJMP LLL LLL: SJMP LOOP1 END
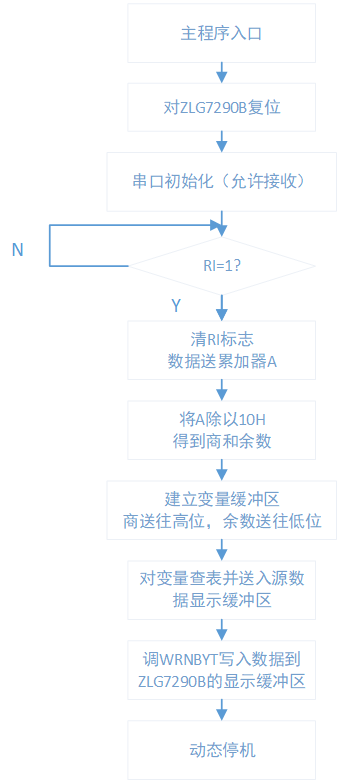
ZLG7290B dynamic display experiment:
Connect LED 1 ~ LED8 with P1 port in order to display the data received from the serial port. When the data received by the serial port is FF0FH, all the lights are on; When the data received by the serial port is FF00H, all the lights are off; When the data received by the serial port is other data, the previous data state is maintained.
(description):
The binary number to be displayed obtained from the original variable buffer is obtained by receiving data through serial port. Divide the two hexadecimal digits obtained from the serial port by 10H, and send the quotient to 31H as the high order; The remainder is sent to 30H for low order, so that the data can be correctly displayed on the nixie tube
(flow chart):
SDA BIT P1.0 SCL BIT P1.1 WSLA EQU 070H RSLA EQU 071H ORG 0000H LJMP START ;main program ORG 0030H START: MOV SP,#60H CLR P1.7 ;ZLG7290B reset MOV TMOD,#20H MOV TH1,#0fdh MOV TH1,#0fdh ; Initial value of sending timing MOV PCON,#00h SETB TR1 CLR RI MOV SCON,#50H ; Serial interface mode 1 (acceptable) LOOP1: JNB RI,LOOP1 ;Judge whether data is received CLR RI ;Clear the accept flag after receiving data MOV A,SBUF ;Data transmission accumulator A SETB P1.7 MOV B,#10H DIV AB MOV R4,A MOV A,B MOV R3,A ;Divide by 10 H,Get quotient and remainder MOV 30H,R3 MOV 31H,R4 ;The quotient is sent to the high position and the remainder is sent to the low position LCALL DELAY MOV DPTR,#LEDSEG ; Start looking up the variable table CLR A MOV R7,#02H MOV R0,#20H MOV R1,#30H LOOP1: MOV A,@R1 MOVC A,@A+DPTR ;Look up the corresponding font code in the table MOV @R0,A ;Send buffer INC R1 INC R0 DJNZ R7,LOOP1 MOV R7,#02H MOV R0,#20H MOV R2,#10H MOV R3,#WSLA LCALL WRNBYT SJMP LOOP LEDSEG: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E4H;60H-61H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EH DELAY: PUSH 00H PUSH 01H MOV R0,#00H DELAY1: MOV R1,#00H DJNZ R1,$ DJNZ R0,DELAY1 POP 01H POP 00H RET ;The following are subroutines ;******************************************************************* ;[Prompt] the following procedure is performed when the system clock is 12 MHZ(Or 11.0592MHZ),Namely NOP The command is about 1 microsecond. ;(1)Multibyte write operation subroutine with internal unit address WRNBYT ;******************************************************************* ;Universal I2C Communication subroutine (multi byte write operation) ;Entry parameters R7 Number of bytes,R0 Source block header address ; R2 Slave device internal sub address;R3 Peripheral device address (write) ;Related subroutineWRBYT,STOP,CACK,STA ;******************************************************************* WRNBYT: PUSH PSW PUSH ACC WRADD: MOV A,R3 ;Take the address of peripheral devices (including r/w=0) LCALL STA ;Send start signal S LCALL WRBYT ;Send peripheral address LCALL CACK ;Detect the response signal of peripheral devices JB F0,WRADD ;If the answer is not correct, return to start again MOV A,R2 LCALL WRBYT ;Send internal register header address LCALL CACK ;Detect the response signal of peripheral devices JB F0,WRADD ;If the answer is not correct, return to start again WRDA: MOV A,@R0 LCALL WRBYT ;Send peripheral address LCALL CACK ;Detect the response signal of peripheral devices JB F0,WRADD ;If the answer is not correct, return to start again INC R0 DJNZ R7,WRDA LCALL STOP POP ACC POP PSW RET ;******************************************************************* ;(2)Multibyte read operation subroutine with internal unit address RDNBYT ;******************************************************************* ;Universal I2C Communication subroutine (multi byte read operation) ;Entry parameters R7 Number of bytes; ;R0 The first address of the target data block; R2 Slave device internal sub address; ;R3 Device address (write); R4 Device address (read) ;Related subroutineWRBYT,STOP,CACK,STA,MNACK ;******************************************************************* RDNBYT: PUSH PSW PUSH ACC RDADD1:LCALL STA MOV A,R3 ;Write address LCALL WRBYT ;Send peripheral address LCALL CACK ;Detect the response signal of peripheral devices JB F0,RDADD1 ;If the answer is not correct, return to start again MOV A,R2 ;Get internal address LCALL WRBYT ;Send peripheral address LCALL CACK ;Detect the response signal of peripheral devices JB F0,RDADD1 ;If the answer is not correct, return to start again LCALL STA MOV A,R4 ;Get device address (read) LCALL WRBYT ;Send peripheral address LCALL CACK ;Detect the response signal of peripheral devices JB F0,RDADD1 ;If the answer is incorrect, return to start again RDN: LCALL RDBYT MOV @R0,A DJNZ R7,ACK LCALL MNACK LCALL STOP POP ACC POP PSW RET ACK: LCALL MACK INC R0 SJMP RDN ;********************************************************************** ;(3)I2C Each signal subroutine ;********************************************************************** ; Start signal subroutine S ;********************************************************************** STA: SETB SDA ;Start signal S SETB SCL NOP ;Generate 4.7US delayed NOP NOP NOP NOP CLR SDA NOP ;Generate 4.7US delayed NOP NOP NOP NOP CLR SCL RET ;********************************************************************** ; Stop signal subroutine P ;********************************************************************** STOP: CLR SDA ;Stop signal P SETB SCL NOP ;Generate 4.7US delayed NOP NOP NOP NOP SETB SDA NOP ;Generate 4.7US delayed NOP NOP NOP NOP SETB SCL ;Release bus SETB SDA RET ;********************************************************************** ; Response signal subroutine MACK ;********************************************************************** MACK: CLR SDA ;Send response signal ACK SETB SCL NOP ;Generate 4.7US delayed NOP NOP NOP NOP CLR SCL SETB SDA RET ;********************************************************************** ; Non response signal subroutine MNACK ;********************************************************************** MNACK: SETB SDA ;Send non reply signal NACK SETB SCL NOP ;Generate 4.7US delayed NOP NOP NOP NOP CLR SCL CLR SDA RET ;********************************************************************** ; Response detection subroutine CACK ;********************************************************************** CACK: SETB SDA ;Response bit detection subroutine SETB SCL CLR F0 MOV C,SDA ;sampling SDA JNC CEND ;Turn when the response is correct CEND SETB F0 ;When answering an error F0 Set one CEND: CLR SCL RET ;********************************************************************** ; Send a byte subroutine WRBYT ;********************************************************************** WRBYT: PUSH 06H MOV R6,#08H ; Send a byte subroutine WLP: RLC A ;Entry parameters A MOV SDA,C SETB SCL NOP ;Generate 4.7US delayed NOP NOP NOP NOP JNB SCL,$ CLR SCL DJNZ R6,WLP POP 06H RET ;********************************************************************** ; Receive a byte subroutine RDBYT ;********************************************************************** RDBYT: PUSH 06H MOV R6,#08H ; Receive a byte subroutine, exit parameter R2 RLP: SETB SDA SETB SCL JNB SCL,$ MOV C,SDA MOV A,R2 RLC A MOV R2,A CLR SCL DJNZ R6,RLP POP 06H RET ;********************************************************************** END ;**********************************************************************