I Introduction to W5500 Ethernet module
Niren_W5500 module is an Ethernet module based on WIZnet W5500 chip, which is the successor of clay figurine electronics Niren_W5100 module is an Ethernet module with better performance and higher cost performance. Module integrated hardware TCP/IP protocol: internal 32K byte memory as TX/RX
Cache: support 10/100Mbps transmission rate; Support the simultaneous operation of 8 independent ports; At the same time, the module also supports 3.3V or 5V power supply. When 5V power supply, it can also output 3.3V power supply, which is convenient for users to use in different single chip microcomputer systems; The communication mode between module and MCU system is simple and convenient SPI communication.
Resource sharing:
Link: Baidu network disk, please enter the extraction code
Extraction code: 1234
Connection method between STM32 and W5500
PA3->W5500_ Rst (the source program uses PC5, and the pin is not modified to PA3)
PC4->W5500_ Int (this pin may not be connected when using the routine of register query mode, and other routines may involve modifying the pin)
PA4->W5500_SCS
PA5->W5500_SCK
PA6->W5500_MISO
PA7->W5500_MOSI
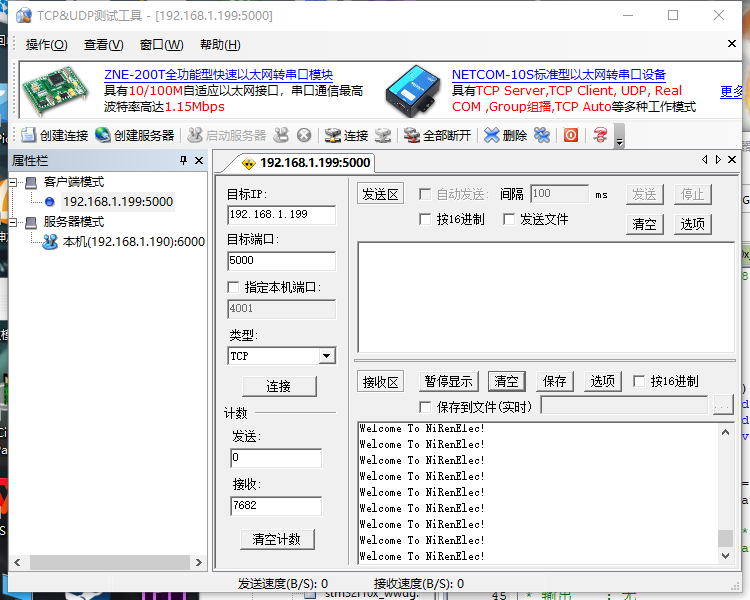
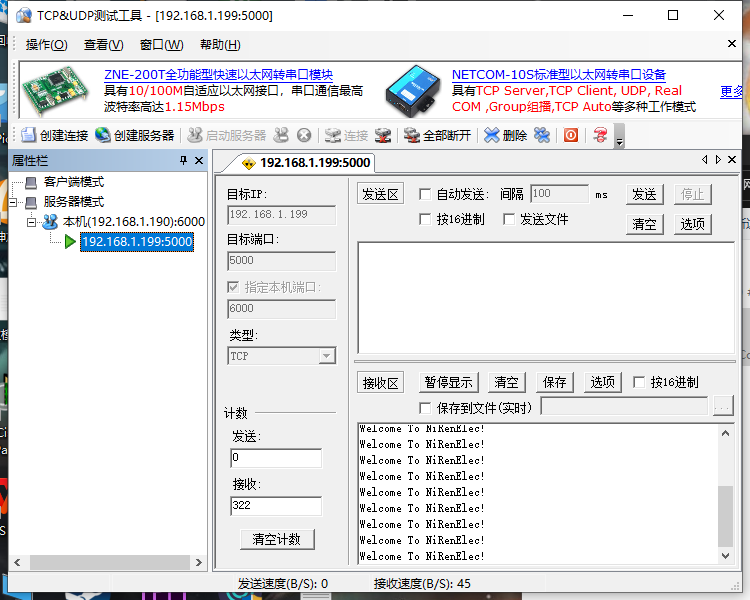
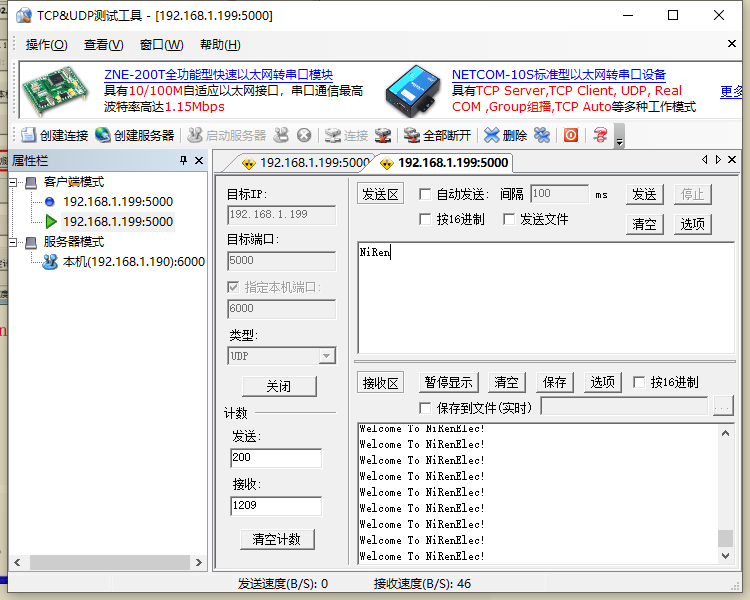
Here, I debugged the UDP mode, server mode and client mode routines in the query register mode. The debugging results are as follows:
Client mode
Server side mode
UDP mode
Learn STM32+W5500+modbus protocol programming
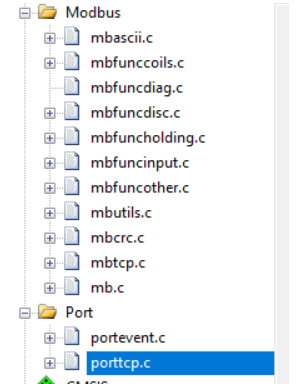
In order to realize Modbus TCP communication, you first need to download the driver source code of W5500, which can be downloaded from the official website of WIZnet: products:w5500:driver [Document Wiki]
After decompression, we need to copy the ethernet folder to our project directory
Find the main() function:
int main(void)
{
unsigned char i;
/* Initialize STM32F103 */
System_Initialization();//system configuration
SysTick_Init();//Start the system tick timer SysTick
/* Config W5500 */
W5500_Configuration();//W5500 configuration
Delay_ms(200);//Delay waiting
/* Modbus-TCP Init */
eMBTCPInit(MB_TCP_PORT_USE_DEFAULT); //Port dependent event module initialization
Delay_ms(200); //Delay waiting
/* Enable Modbus-TCP Stack */
eMBEnable();//Activate protocol stack
printf("\r\nModbus-TCP Start!\r\n");
printf("IP:192.168.1.128\r\n");
while(1)
{
i=Read_SOCK_1_Byte(0,Sn_SR); //Read W5500 status
if(i==0)
{
do
{
Delay_ms(100);//Delay waiting
}while(Socket_Listen(0)==FALSE);//Set "Socket n" to "TCP server mode"
}
else if(i==SOCK_ESTABLISHED) //Establish TCP connection
{
eMBPoll();//Start modbus listening
BSP_LED();//Coil control LED
}
}
}
To view the W5500 configuration function:
/* W5500 configuration */
void W5500_Configuration()
{
unsigned char array[6];
GPIO_SetBits(GPIO_W5500_RST_PORT, GPIO_W5500_RST_Pin);//Pull up
Delay_ms(100); /*delay 100ms Delay using systick 1ms time base*/
//Waiting for Ethernet link
while((Read_1_Byte(PHYCFGR)&LINK)==0); /* Waiting for Ethernet Link */
Write_1_Byte(MR, RST);//Write one byte to W5500 general register
Delay_ms(20); /*delay 20ms */
/* Set Gateway IP as: 192.168.1.1 */
array[0]=192;
array[1]=168;
array[2]=1;
array[3]=1;
Write_Bytes(GAR, array, 4);//Set gateway IP
/* Set Subnet Mask as: 255.255.255.0 */
array[0]=255;
array[1]=255;
array[2]=255;
array[3]=0;
Write_Bytes(SUBR, array, 4);//Set subnet mask
/* Set MAC Address as: 0x48,0x53,0x00,0x57,0x55,0x00 */
array[0]=0x48;
array[1]=0x53;
array[2]=0x00;
array[3]=0x57;
array[4]=0x55;
array[5]=0x00;
Write_Bytes(SHAR, array, 6);//Set MAC address
/* Set W5500 IP as: 192.168.1.128 */
array[0]=192;
array[1]=168;
array[2]=1;
array[3]=128;
Write_Bytes(SIPR, array, 4);//Set IP address of W5500
}
Learn the web service of STM32+W5500
1. The basic network access configuration of STM32 W5500 can be pinged for reference STM32F103RC drives W5500 to access the network and can ping_ lnniyunlong99 column - CSDN blog
2. There is no problem with the TCP Server loopback test of STM32 W5500. You can refer to STM32 W5500 TCP Server loopback test_ lnniyunlong99 column - CSDN blog
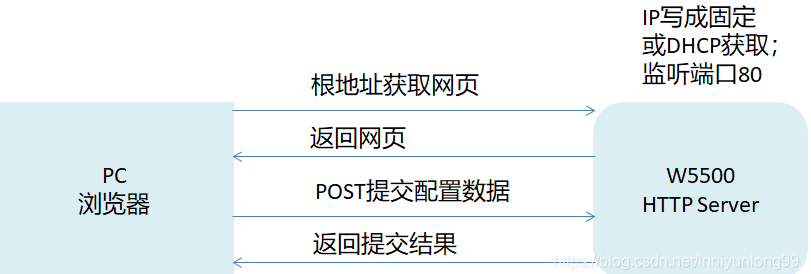
3. Have a certain understanding of HTTP protocol.
Determine the function of the web service to be realized. After the STM32 W5500 is configured to access the network, dynamically obtain the IP address through DHCP, enter the IP address in the address bar of the computer browser, you can obtain the page of a simple form, enter data in the form, submit it to the w5500 web service, and return a result
Project code sharing:
Link: Baidu network disk, please enter the extraction code
Extraction code: 1234
main function:
int main(void)
{
Systick_Init(72);//System clock initialization
GPIO_Configuration(); //GPIO configuration
USART1_Init(); //Serial port initialization: 115200@8-n-1
printf("W5500 EVB initialization over.\r\n");
Reset_W5500();
WIZ_SPI_Init();//W5500 related pin configuration
printf("W5500 initialized!\r\n");
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7))
{
DefaultSet();//Factory value
}
else
{
get_config();//read config data from flash
}
printf("Firmware ver%d.%d\r\n",ConfigMsg.sw_ver[0],ConfigMsg.sw_ver[1]);
if(ConfigMsg.debug==0) ConfigMsg.debug=1;
set_network();//Configure network information
printf("Network is ready.\r\n");
while(1)
{
if(ConfigMsg.JTXD_Control == 0)
do_http();//Open http service
else
JTXD_do_http();
if(reboot_flag)
NVIC_SystemReset();//Initiate system reset request to reset MCU
// reboot();
}
}
GPIO initialization function:
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO , ENABLE);
// Port A output
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_0|GPIO_Pin_1| GPIO_Pin_2 |GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// GPIO_ResetBits(GPIOA, GPIO_Pin_0);
// GPIO_ResetBits(GPIOA, GPIO_Pin_1);
// GPIO_SetBits(GPIOA, GPIO_Pin_2); // led off
// GPIO_SetBits(GPIOA, GPIO_Pin_3); // led off
// Port B output;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_9);
// Port C input
// GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
// GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;//Control flash
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_7);
}
W5500 related configuration:
void WIZ_SPI_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE);
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB |RCC_APB2Periph_AFIO , ENABLE);
// Port B output
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_12);
/* Configure SPIy pins: SCK, MISO and MOSI */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13| GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* SPI Config -------------------------------------------------------------*/
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI2, &SPI_InitStructure);
SPI_Cmd(SPI2, ENABLE);
}
http request:
void do_http(void)
{
uint8 ch=SOCK_HTTP;
uint16 len;
st_http_request *http_request;
memset(rx_buf,0x00,MAX_URI_SIZE);
http_request = (st_http_request*)rx_buf; // struct of http request
/* http service start */
switch(getSn_SR(ch))
{
case SOCK_INIT:
listen(ch);
break;
case SOCK_LISTEN:
break;
case SOCK_ESTABLISHED:
//case SOCK_CLOSE_WAIT:
if(getSn_IR(ch) & Sn_IR_CON)
{
setSn_IR(ch, Sn_IR_CON);
}
if ((len = getSn_RX_RSR(ch)) > 0)
{
len = recv(ch, (uint8*)http_request, len);
*(((uint8*)http_request)+len) = 0;
proc_http(ch, (uint8*)http_request); // request is processed
disconnect(ch);
}
break;
case SOCK_CLOSE_WAIT:
if ((len = getSn_RX_RSR(ch)) > 0)
{
//printf("close wait: %d\r\n",len);
len = recv(ch, (uint8*)http_request, len);
*(((uint8*)http_request)+len) = 0;
proc_http(ch, (uint8*)http_request); // request is processed
}
disconnect(ch);
break;
case SOCK_CLOSED:
socket(ch, Sn_MR_TCP, 80, 0x00); /* reinitialize the socket */
break;
default:
break;
}// end of switch
}
void JTXD_do_http(void)
{
uint8 ch=SOCK_HTTP;
uint16 len;
st_http_request *http_request;
memset(rx_buf,0x00,MAX_URI_SIZE);
http_request = (st_http_request*)rx_buf; // struct of http request
/* http service start */
switch(getSn_SR(ch))
{
case SOCK_INIT:
listen(ch);
break;
case SOCK_LISTEN:
break;
case SOCK_ESTABLISHED:
//case SOCK_CLOSE_WAIT:
if(getSn_IR(ch) & Sn_IR_CON)
{
setSn_IR(ch, Sn_IR_CON);
}
if ((len = getSn_RX_RSR(ch)) > 0)
{
len = recv(ch, (uint8*)http_request, len);
*(((uint8*)http_request)+len) = 0;
JTXD_proc_http(ch, (uint8*)http_request); // request is processed
disconnect(ch);
}
break;
case SOCK_CLOSE_WAIT:
if ((len = getSn_RX_RSR(ch)) > 0)
{
//printf("close wait: %d\r\n",len);
len = recv(ch, (uint8*)http_request, len);
*(((uint8*)http_request)+len) = 0;
JTXD_proc_http(ch, (uint8*)http_request); // request is processed
}
disconnect(ch);
break;
case SOCK_CLOSED:
socket(ch, Sn_MR_TCP, 80, 0x00); /* reinitialize the socket */
break;
default:
break;
}// end of switch
}
The initial IP address is 192.168 1.000, switch between the default value and flash through the operation of PB7, write the set parameters to flash, w5500 is connected to SPI2, and the single chip microcomputer is stm32f103c8t6.
The first web page does not have any modification permission. Only enter the login password (universal password: 765997) to enter the modification page. You can modify parameters, including login password.
The browser uses Chrome.
reference resources
STM32+W5500 Ethernet module_ Witty orange blog - CSDN blog
STM32F103RC drives W5500 to access the network and can ping_ lnniyunlong99 column - CSDN blog
STM32 W5500 TCP Server loopback test_ lnniyunlong99 column - CSDN blog