In the previous section, we built templates and created single tasks. In this section, we build multi tasks
uCOSIII system transplantation (I) construction of single task
Task requirements: build three tasks (two LED s and one BUZ)
Refer to the transplantation of wildfire. (my board is different from wildfire, so I need to make some changes)
schematic diagram:
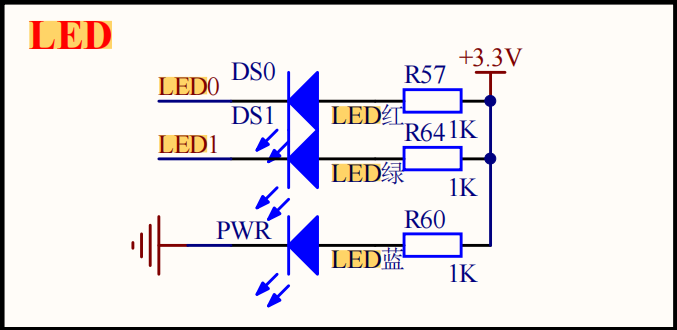
The lowest blue light is the power indicator, and LED0 and LED1 are lit at low level according to the schematic diagram (so we should set the corresponding pins of these two LEDs to high level during initialization)
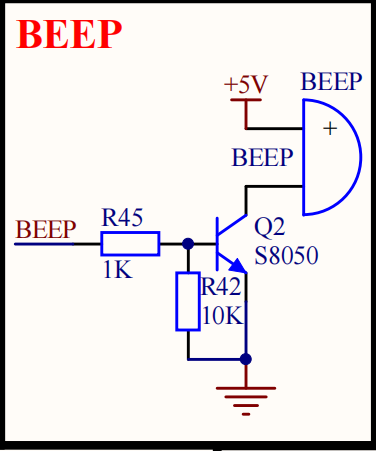
BEEP we set the initialization to low level (high level operation) according to the schematic diagram
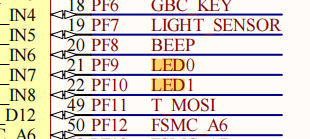
Corresponding pin relationship
PF8—BUZ
PF9—LED0
PF10—LED1
LED.C
void LED_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd ( LED1_GPIO_CLK| LED2_GPIO_CLK| BUZ_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = LED1_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = LED2_PIN;
GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = BUZ_PIN;
GPIO_Init(BUZ_GPIO_PORT, &GPIO_InitStructure);
LED_MODE3; //This is for Macro definition in h file / * turn off LED1/LED2 light*/
}
F407 clock mount
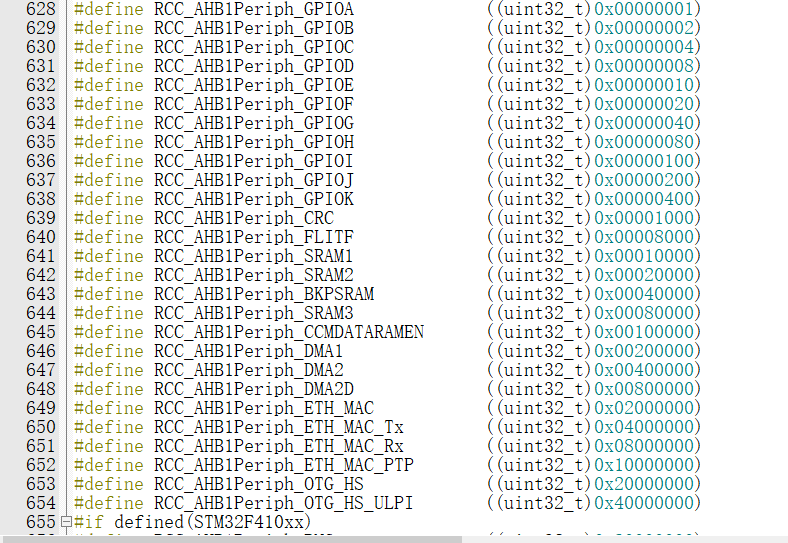
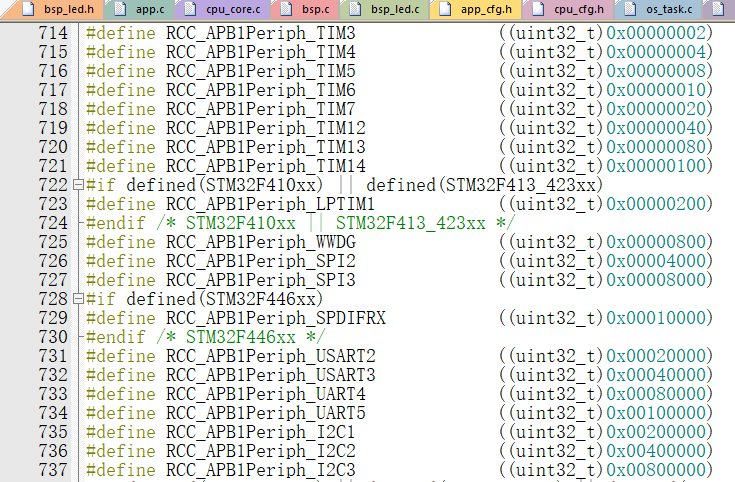
For F407 series boards, it can be seen that most of the IO ports are on the AHB1 bus, so the clock is used to write RCC directly when initializing peripherals (most of them need special attention)_ AHB1PeriphClockCmd
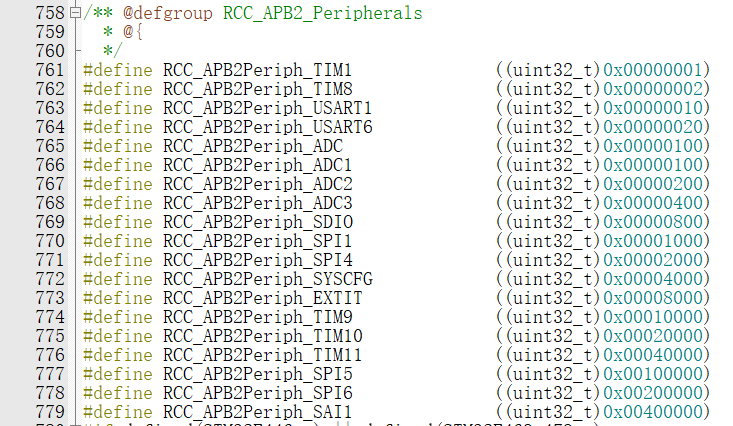
When using timer (TIM), serial port (UART) and SPI (as shown in the following two figures), you can see that APB1 or APB2 clock is used
It can be seen that three I2C of F407 are all on APB1 clock bus and four ADC s are all on APB2 clock bus
LED. H (macro definition madness)
#ifndef __LED_H
#define __LED_H
#include "stm32f4xx.h"
//Pin definition
/*******************************************************/
//LED1
#define LED1_PIN GPIO_Pin_9
#define LED1_GPIO_PORT GPIOF
#define LED1_GPIO_CLK RCC_AHB1Periph_GPIOF
//LED2
#define LED2_PIN GPIO_Pin_10
#define LED2_GPIO_PORT GPIOF
#define LED2_GPIO_CLK RCC_AHB1Periph_GPIOF
//BUZ
#define BUZ_PIN GPIO_Pin_8
#define BUZ_GPIO_PORT GPIOF
#define BUZ_GPIO_CLK RCC_AHB1Periph_GPIOF
/************************************************************/
/** Macro to control the LED light on and off,
* LED Low level on, set ON=0, OFF=1
* If the LED high level is on, set the macro to ON=1 and OFF=0
*/
#define ON 0
#define OFF 1
/* Macros with parameters can be used like inline functions */
#define LED1(a) if (a) \
GPIO_SetBits(LED1_GPIO_PORT,LED1_PIN);\
else \
GPIO_ResetBits(LED1_GPIO_PORT,LED1_PIN)
#define LED2(a) if (a) \
GPIO_SetBits(LED2_GPIO_PORT,LED2_PIN);\
else \
GPIO_ResetBits(LED2_GPIO_PORT,LED2_PIN)
#define BUZ(a) if (a) \
GPIO_SetBits(BUZ_GPIO_PORT,BUZ_PIN);\
else \
GPIO_ResetBits(BUZ_GPIO_PORT,BUZ_PIN)
/* The method of directly operating registers controls IO */
#define digitalHi(p,i) {p->BSRRL=i;} // Set to high level
#define digitalLo(p,i) {p->BSRRH=i;} // Output low level
#define digitalToggle(p,i) {p->ODR ^=i;} // Output reversal state
/* Define macros that control IO */
#define LED1_TOGGLE digitalToggle(LED1_GPIO_PORT,LED1_PIN) / / Flip
#define LED1_OFF digitalHi(LED1_GPIO_PORT,LED1_PIN)
#define LED1_ON digitalLo(LED1_GPIO_PORT,LED1_PIN)
#define LED2_TOGGLE digitalToggle(LED2_GPIO_PORT,LED2_PIN)
#define LED2_OFF digitalHi(LED2_GPIO_PORT,LED2_PIN)
#define LED2_ON digitalLo(LED2_GPIO_PORT,LED2_PIN)
#define BUZ_TOGGLE digitalToggle(BUZ_GPIO_PORT,BUZ_PIN)
#define BUZ_ON digitalHi(BUZ_GPIO_PORT,BUZ_PIN) / / buzzer high level on
#define BUZ_OFF digitalLo(BUZ_GPIO_PORT,BUZ_PIN) / / low level shutdown
//LED1 on LED2 off
#define LED_MODE1 \
LED1_ON;\
LED2_OFF;\
//LED1 off LED2 on
#define LED_MODE2 \
LED1_OFF;\
LED2_ON;\
//LED1 and LED2 are closed
#define LED_MODE3 \
LED1_OFF;\
LED2_OFF;\
//LED1 and LED2 are on
#define LED_MODE4 \
LED1_OFF;\
LED2_OFF;\
void LED_GPIO_Config(void);
#endif /* __LED_H */
You can see many macro definitions here. Most of them are changed directly after transplantation The macro in the file is OK, as mentioned in the previous section.
//LED1 #define LED1_PIN GPIO_Pin_9 #define LED1_GPIO_PORT GPIOF #define LED1_GPIO_CLK RCC_AHB1Periph_GPIOF //LED2 #define LED2_PIN GPIO_Pin_10 #define LED2_GPIO_PORT GPIOF #define LED2_GPIO_CLK RCC_AHB1Periph_GPIOF //BUZ #define BUZ_PIN GPIO_Pin_8 #define BUZ_GPIO_PORT GPIOF #define BUZ_GPIO_CLK RCC_AHB1Periph_GPIOF
The next step is to add the initialization function to
BSP.C
In this function, all initialization functions will be put here in the future (specification)
APP.C
#include <includes.h>
/*============Task control block==============*/
static OS_TCB AppTaskStartTCB;
static OS_TCB AppTaskLed1TCB;
static OS_TCB AppTaskLed2TCB;
static OS_TCB AppTaskbuz3TCB;
/*======================Task stack size=====================*/
static CPU_STK AppTaskStartStk[APP_TASK_START_STK_SIZE];
static CPU_STK AppTaskLed1Stk [ APP_TASK_LED1_STK_SIZE ];
static CPU_STK AppTaskLed2Stk [ APP_TASK_LED2_STK_SIZE ];
static CPU_STK AppTaskBUZStk [ APP_TASK_BUZ3_STK_SIZE ];
/*=====================Function declaration======================*/
static void APPTaskStart (void *p_arg);
static void AppTaskLed1 ( void * p_arg );
static void AppTaskLed2 ( void * p_arg );
static void AppTaskBUZ3 ( void * p_arg );
int main (void)
{
OS_ERR err;
OSInit(&err); /* Init uC/OS-III. */
OSTaskCreate((OS_TCB *)&AppTaskStartTCB, /* Create the start task Task control block */
(CPU_CHAR *)"App Task Start", /* Task name */
(OS_TASK_PTR ) APPTaskStart, /* Task interface */
(void *) 0, /* Parameters passed to the task function */
(OS_PRIO ) APP_TASK_START_PRIO, /* Task priority */
(CPU_STK *)&AppTaskStartStk[0], /* Task stack start address (base address) */
(CPU_STK_SIZE) APP_TASK_START_STK_SIZE / 10, /* Remaining stack size (task stack depth limit) */
(CPU_STK_SIZE) APP_TASK_START_STK_SIZE, /* Task stack size */
(OS_MSG_QTY ) 5u, /* The maximum number of messages that the task internal message queue can receive. When it is 0, it is forbidden to receive messages */
(OS_TICK ) 0u, /* The time slice length when the time slice rotation is enabled. When it is 0, it is the default length */
(void *) 0, /* User supplementary storage */
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),/*Task options */
(OS_ERR *)&err); /*Store the return value of the function when the error occurs*/
OSStart(&err); //Start ucosiii / * start multitasking (i.e. give control to UC / os-iii)*/
while(1);
}
static void APPTaskStart (void *p_arg)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
OS_ERR err;
(void)p_arg;
/*Development board hardware initialization*/
CPU_Init();
BSP_Init(); /* Initialize BSP functions */
cpu_clk_freq = BSP_CPU_ClkFreq(); /* Determine SysTick reference freq. */
cnts = cpu_clk_freq / (CPU_INT32U)OSCfg_TickRate_Hz; /* Determine nbr SysTick increments */
OS_CPU_SysTickInit(cnts); /* Init uC/OS periodic time src (SysTick). */
/*Memory initialization*/
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //Statistical task / * Compute CPU capacity with no task running*/
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN
CPU_IntDisMeasMaxCurReset();
#endif
/*==========================================App Task Led1================================================================*/
OSTaskCreate((OS_TCB *)&AppTaskLed1TCB, /* Create the Led1 task */
(CPU_CHAR *)"App Task Led1",
(OS_TASK_PTR ) AppTaskLed1,
(void *) 0,
(OS_PRIO ) APP_TASK_LED1_PRIO,
(CPU_STK *)&AppTaskLed1Stk[0],
(CPU_STK_SIZE) APP_TASK_LED1_STK_SIZE / 10,
(CPU_STK_SIZE) APP_TASK_LED1_STK_SIZE,
(OS_MSG_QTY ) 5u,
(OS_TICK ) 0u,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/*===========================================App Task Led2================================================================*/
OSTaskCreate((OS_TCB *)&AppTaskLed2TCB, /* Create the Led2 task */
(CPU_CHAR *)"App Task Led2",
(OS_TASK_PTR ) AppTaskLed2,
(void *) 0,
(OS_PRIO ) APP_TASK_LED2_PRIO,
(CPU_STK *)&AppTaskLed2Stk[0],
(CPU_STK_SIZE) APP_TASK_LED2_STK_SIZE / 10,
(CPU_STK_SIZE) APP_TASK_LED2_STK_SIZE,
(OS_MSG_QTY ) 5u,
(OS_TICK ) 0u,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/*============================================App Task BUZ3==========================================================*/
OSTaskCreate((OS_TCB *)&AppTaskbuz3TCB, /* Create the BUZ3 task */
(CPU_CHAR *)"App Task BUZ3",
(OS_TASK_PTR ) AppTaskBUZ3,
(void *) 0,
(OS_PRIO ) APP_TASK_BUZ3_PRIO ,
(CPU_STK *)&AppTaskBUZStk[0],
(CPU_STK_SIZE) APP_TASK_BUZ3_STK_SIZE / 10,
(CPU_STK_SIZE) APP_TASK_BUZ3_STK_SIZE,
(OS_MSG_QTY ) 5u,
(OS_TICK ) 0u,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
OSTaskDel ( & AppTaskStartTCB, & err ); //Delete own task
}
/*
*********************************************************************************************************
* LED1 TASK
*********************************************************************************************************
*/
static void AppTaskLed1 ( void * p_arg )
{
OS_ERR err;
(void)p_arg;
while (DEF_TRUE) { /* Task body, always written as an infinite loop. */
LED1_TOGGLE;
OSTimeDly ( 1000, OS_OPT_TIME_DLY, & err );
}
}
/*
*********************************************************************************************************
* LED2 TASK
*********************************************************************************************************
*/
static void AppTaskLed2 ( void * p_arg )
{
OS_ERR err;
(void)p_arg;
while (DEF_TRUE) { /* Task body, always written as an infinite loop. */
LED2_TOGGLE;
OSTimeDly ( 500, OS_OPT_TIME_DLY, & err );
}
}
/*
*********************************************************************************************************
* BUZ TASK
*********************************************************************************************************
*/
static void AppTaskBUZ3 ( void * p_arg )
{
OS_ERR err;
(void)p_arg;
while (DEF_TRUE) { /* Task body, always written as an infinite loop. */
//BUZ_TOGGLE;
BUZ_OFF;
OSTimeDly ( 500, OS_OPT_TIME_DLY, & err );
}
}
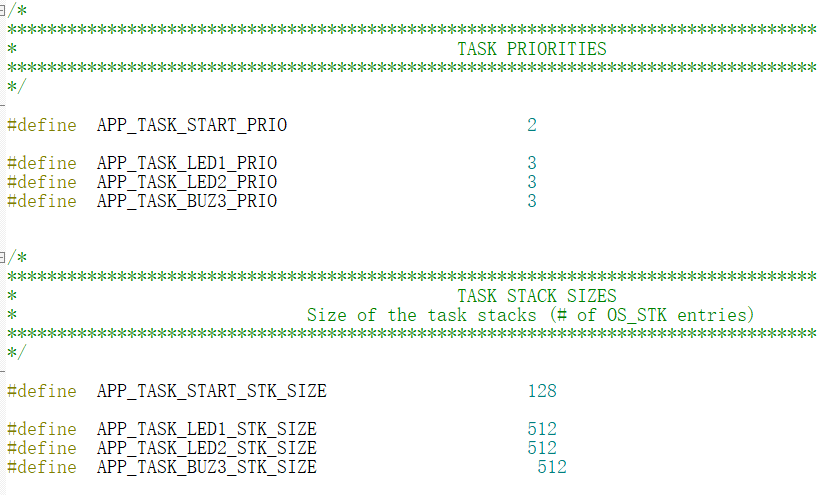
Specify the stack size and priority in app_cfg.h
Here, three separate tasks are constructed, and the general process is as follows
1. Define task control block
2. Define the stack size of each task
3. Create a task first (instructions in the task, stack residue, priority, interface function, etc.)
4. Add three new tasks to the last created task and delete the task itself ostask del() (or suspend)
5. Start the initial creation task
Complete project Download
Select project: 2 UCOS multitasking construction
Author: Jiang Duoduo (student in school)
Copyright reserved. Welcome to reprint with the original link:)
Never forget the original intention, keep the mission in mind, and be inspired to become an excellent embedded siege lion! (my 16th blog)