Write before:
I wanted to be in Ubuntu 18 We ran ORB-SLAM3 on 04, but I don't know which step was wrong. There were many errors in the last step of compilation. We couldn't find many solutions online, because we used to work in Ubuntu 18 04 ran Gaobo's slambook2 routine, installed multiple versions of libraries, felt that different libraries affected each other, and simply directly installed Ubuntu 20 04 build the operation environment from scratch, ubuntu18 We'll find a way after the mistake on 04.
(added a few days later: it's not the problem I installed. Maybe there were bug s in master and v1.0-release, which just made me catch up. Finally, I installed v0.4-beta successfully!!!)
Error code:
$ ./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH_01_easy ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt num_seq = 1 Loading images for sequence 0...LOADED! ------- ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza. ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza. This program comes with ABSOLUTELY NO WARRANTY; This is free software, and you are welcome to redistribute it under certain conditions. See LICENSE.txt. Input sensor was set to: Monocular Loading settings from ./Examples/Monocular/EuRoC.yaml Camera1.k3 optional parameter does not exist... -Loaded camera 1 -Loaded image info -Loaded ORB settings Viewer.imageViewScale optional parameter does not exist... -Loaded viewer settings System.LoadAtlasFromFile optional parameter does not exist... System.SaveAtlasToFile optional parameter does not exist... -Loaded Atlas settings System.thFarPoints optional parameter does not exist... -Loaded misc parameters ---------------------------------- SLAM settings: -Camera 1 parameters (Pinhole): [ 458.65399169921875 457.29598999023438 367.21499633789062 248.375 ] -Camera 1 distortion parameters: [ -0.28340810537338257 0.073959067463874817 0.00019359000725671649 1.7618711353861727e-05 ] -Original image size: [ 752 , 480 ] -Current image size: [ 600 , 350 ] -Camera 1 parameters after resize: [ 365.94735717773438 333.44500732421875 292.99069213867188 181.10678100585938 ] -Sequence FPS: 20 -Features per image: 1000 -ORB scale factor: 1.2000000476837158 -ORB number of scales: 8 -Initial FAST threshold: 20 -Min FAST threshold: 7 Loading ORB Vocabulary. This could take a while... Vocabulary loaded! Initialization of Atlas from scratch Creation of new map with id: 0 Creation of new map with last KF id: 0 Seq. Name: There are 1 cameras in the atlas Camera 0 is pinhole First KF:0; Map init KF:0 New Map created with 346 points Shutdown Saving trajectory to CameraTrajectory.txt ... There are 1 maps in the atlas Map 0 has 299 KFs End of saving trajectory to CameraTrajectory.txt ... Saving keyframe trajectory to KeyFrameTrajectory.txt ...
Ubuntu18.04 - new system re installation ORB-SLAM3 process
Please rest assured that the following installation process is correct
Environmental description:
Virtual machine VMware + Ubuntu 20 04 + Win10(i5-8500)
1, Preparation:
Copy and paste terminal and host
sudo apt-get autoremove open-vm-tools sudo apt-get install open-vm-tools-desktop

Restart virtual machine VMware
After vmtools is installed, restart through the setting button in the upper right corner, not through the restart in the upper left corner of vmware.
1. Install git
sudo apt-get install git
2. Install vi editor
Uninstall the old vim before installing the new one.
sudo apt-get remove vim-common sudo apt-get install vim
3. Install the c + + compiler
sudo apt install g++
4. Installation CMake-3.18.4
sudo apt install build-essential libssl-dev wget https://github.com/Kitware/CMake/releases/download/v3.18.4/cmake-3.18.4.tar.gz tar -zxvf cmake-3.18.4.tar.gz cd cmake-3.18.4 ./bootstrap make sudo make install
# View version cmake -version

5. Download the ORB-SLAM3 source code
First create a new directory for the source code.
mkdir orb_slam3 cd orb_slam3 git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
At this stage, the preparations have been basically completed, and the next step is to install other libraries.
2, Install various dependent Libraries
1.Eigen3.3.4 installation
#github has a mirror, version 3.3.4 from 2017 git clone https://github.com/eigenteam/eigen-git-mirror #install cd eigen-git-mirror mkdir build cd build cmake .. sudo make install #After installation, the header file is installed in / usr/local/include/eigen3/

2.Pangolin installation
install Pangolin Required dependencies sudo apt install libgl1-mesa-dev sudo apt install libglew-dev //sudo apt install cmake / / note that the previous installation is unnecessary sudo apt install libpython2.7-dev //sudo apt install python-pip //sudo python -mpip install numpy pyopengl Pillow pybind11 sudo apt install pkg-config sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols //sudo apt install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev libavdevice-dev //sudo apt install libdc1394-22-dev libraw1394-dev //sudo apt install libjpeg-dev libpng-dev libtiff5-dev libopenexr-dev
# The default git version is 0.6 //git clone https://github.com/stevenlovegrove/Pangolin.git //Pit! What a hole! Pangolin master version cannot be installed git clone https://github.com/stevenlovegrove/Pangolin/tree/v0.6.git cd Pangolin mkdir build && cd build cmake .. make -j4 sudo make install
Check for successful installation:
cd examples/HelloPangolin ./HelloPangolin

3.OpenCV3.3.5 installation
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main" sudo apt update sudo apt install libjasper1 libjasper-dev sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff4.dev libswscale-dev libjasper-dev
Here I made a mistake:
obtain:1 http://202.199.28.2/files/4135000001411F7F/http.kali.org/kali focal/main amd64 m4 amd64 1.4.18-4 [199 kB]
error:1 http://202.199.28.2/files/4135000001411F7F/http.kali.org/kali focal/main amd64 m4 amd64 1.4.18-4
File size mismatch(202872 != 199128). The image you are using is being synchronized? [IP: 202.199.28.2 80]
Hashes of expected file:
- SHA256:1ffa955ebb58829f3ab0debf7ad57b150887f6a44769edbaef68b8da9d95f306
- SHA1:e65ec1a9d9c7ee858f50b3408bfedb9f675b1069 [weak]
- MD5Sum:3785537d21012e0e481f0fea152b04a1 [weak]
- Filesize:199128 [weak]
E: Unable to download http://202.199.28.2/files/4135000001411F7F/http.kali.org/kali/pool/main/m/m4/m4_1.4.18-4_amd64.deb file size does not match (202872! = 199128). The image you are using is being synchronized? [IP: 202.199.28.2 80]
Hashes of expected file:
- SHA256:1ffa955ebb58829f3ab0debf7ad57b150887f6a44769edbaef68b8da9d95f306
- SHA1:e65ec1a9d9c7ee858f50b3408bfedb9f675b1069 [weak]
- MD5Sum:3785537d21012e0e481f0fea152b04a1 [weak]
- Filesize:199128 [weak]
E: Several software packages cannot be downloaded or run apt-get update Or add --fix-missing Try again?
After changing a lot of sources, it didn't work. Finally, it was found that it was libgtk2 The problem of 0-dev dependency
sudo apt install libgtk2.0-dev --fix-missing
Download opencv3 three point five
Then enter the unzipped folder and open it at the terminal
Next, on the command line, enter:
# Configure and compile mkdir build&& cd build cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
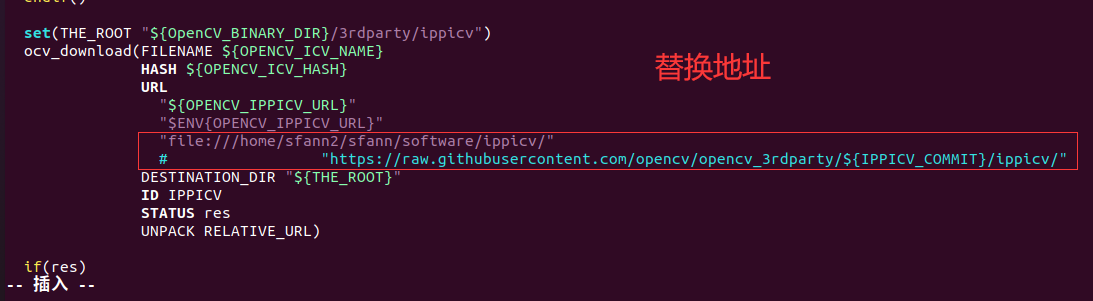
Note: after executing the above instructions, the terminal will automatically download a necessary ippicv acceleration library.
If the computer is configured with vpn and enters the Internet, it will be stuck for a while to download;

Solution: download the offline ippicv library
//If the download of ippicv package is too slow, the installation will be interrupted and you can download it yourself
https://github.com/opencv/opencv_3rdparty/tree/ippicv/master_20180723
//I put the package ippicv in / home/sfann2/sfann/software /
"file:///##/##/Download / "# (for reference only, fill in according to your own path)
//I will“ https://raw.githubusercontent.com/opencv/opencv_3rdparty/${IPPICV_COMMIT}/ippicv/"
//Replace with“ file:///home/sfann2/sfann/software/ippicv/ "Watch the semicolon
//Recompile
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j4
sudo make install
Replacement process:
After recompilation:

At this point, OpenCV is installed, and then we configure the environment
#Add library path sudo /bin/bash -c 'echo "/usr/local/lib" > /etc/ld.so.conf.d/opencv.conf' #Update system library sudo ldconfig
#Configure bash sudo gedit /etc/bash.bashrc # 1. Paste the following two lines of code at the end PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig export PKG_CONFIG_PATH # 2. Save and execute the following commands to make the configuration effective: source /etc/bash.bashrc

#to update apt-get install mlocate sudo updatedb
#opencv version detection pkg-config --modversion opencv

4. Install Python & libssl dev
sudo apt install libpython2.7-dev
sudo apt-get install libssl-dev
5. Install the boost library
Boost is a powerful, exquisitely constructed, cross platform, open source and completely free C + + library.
Enter the boost official website: https://www.boost.org/
Or the same as I downloaded Download is 1.75.0

Run after decompression
sudo ./bootstrap.sh sudo ./b2 install
3, Install ORB-SLAM3
cd ORB_SLAM3 chmod +x build.sh ./build.sh
If the compilation fails, you can enter build SH compiles step by step, that is, slow down and take a long time;
echo "Configuring and building Thirdparty/DBoW2 ..." cd Thirdparty/DBoW2 mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make cd ../../g2o echo "Configuring and building Thirdparty/g2o ..." mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make cd ../../../ echo "Uncompress vocabulary ..." cd Vocabulary tar -xf ORBvoc.txt.tar.gz cd.. echo "Configuring and building ORB_SLAM3 ..." mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make //If you can't, you can replace it with make -j4

Possible compilation errors:
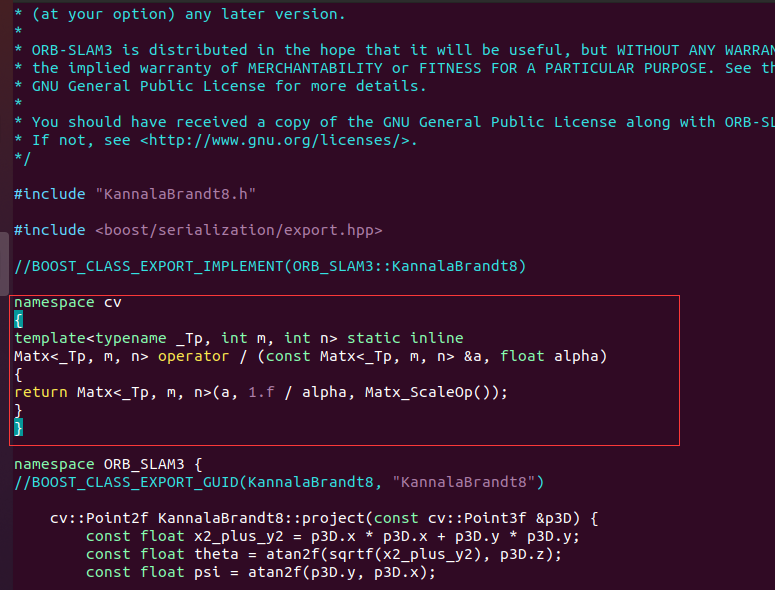
make[2]: *** [CMakeFiles/ORB_SLAM3.dir/build.make:89: CMakeFiles/ORB_SLAM3.dir/src/LocalMapping.cc.o] Error 1 make[2]: *** [CMakeFiles/ORB_SLAM3.dir/build.make:349: CMakeFiles/ORB_SLAM3.dir/src/CameraModels/KannalaBrandt8.cpp.o] Error 1
terms of settlement:
In the error file, such as kannalbrandt8 cpp,LocalMapping.cc
Add the following code after include
namespace cv
{
template<typename _Tp, int m, int n> static inline
Matx<_Tp, m, n> operator / (const Matx<_Tp, m, n> &a, float alpha)
{
return Matx<_Tp, m, n>(a, 1.f / alpha, Matx_ScaleOp());
}
}

4, Dataset testing
1. Data set download
Method 1:
Data set download address Download ASL format
Method 2:
Alicloud disk MH01
2. Modify dataset
- Download from the official website Euroc dataset , ASL format;
- Path: ORB_SLAM3/dataset/MH_##/mav0 (for example, the file name of MH01 after decompression is mav0. Create a new MH01 folder in the dataset folder and put mav0 in it. Do not directly modify the file name!!!)
- Double click the script "euroc_examples.sh" in the ORB-SLAM3 source code to find the instruction containing MH01
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono //Modify dataset path ./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
5, Result display

Operation results:
$ ./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH_01_easy ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt num_seq = 1 Loading images for sequence 0...LOADED! ------- ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza. ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza. This program comes with ABSOLUTELY NO WARRANTY; This is free software, and you are welcome to redistribute it under certain conditions. See LICENSE.txt. Input sensor was set to: Monocular Loading ORB Vocabulary. This could take a while... Vocabulary loaded! Creation of new map with id: 0 Creation of new map with last KF id: 0 Seq. Name: Camera Parameters: - Camera: Pinhole - fx: 458.65399169921875 - fy: 457.29598999023438 - cx: 367.21499633789062 - cy: 248.375 - k1: -0.28340810537338257 - k2: 0.073959067463874817 - p1: 0.00019359000725671649 - p2: 1.7618711353861727e-05 - fps: 20 - color order: RGB (ignored if grayscale) ORB Extractor Parameters: - Number of Features: 1000 - Scale Levels: 8 - Scale Factor: 1.2000000476837158 - Initial Fast Threshold: 20 - Minimum Fast Threshold: 7 Framebuffer with requested attributes not available. Using available framebuffer. You may see visual artifacts.First KF:0; Map init KF:0 New Map created with 315 points Point distribution in KeyFrame: left-> 315 --- right-> 0 TRACK_REF_KF: Less than 15 matches!! KF in map: 278 Fail to track local map! Fail to track local map! Fail to track local map! Fail to track local map! Fail to track local map! Fail to track local map! Fail to track local map! Fail to track local map! Fail to track local map! Relocalized!! Fail to track local map! Fail to track local map! Relocalized!! MakeCurrent: Not available with non-pangolin window. Saving trajectory to CameraTrajectory.txt ... End of saving trajectory to CameraTrajectory.txt ... Saving keyframe trajectory to KeyFrameTrajectory.txt ...
7, Possible error reporting


Solution: download the dataset again