Previously, we successively explained the introduction of software and hardware and counting examples, the basic use of camera, visual positioning based on shape matching, whether BLOB has detection, measuring size, the calibration function used in machine vision scheme, and the function of ZDevelop software to identify bar code and QR code.
In this course, we share with you the basic measurement function of machine vision - measuring point / line / circle.
Video tutorial: VPLC series machine vision motion control all-in-one machine quick start 8 measuring point line circle (2)
01 detection principle
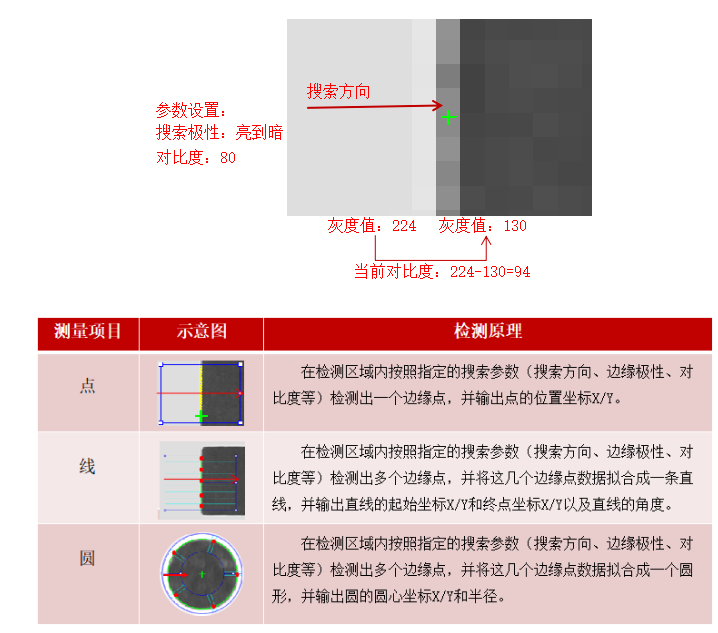
The function of measuring point / line / circle used in machine vision is a vision algorithm based on edge detection.
Edge detection is to search the transition edge points that meet the requirements of polarity change and contrast pixel by pixel in a certain search area according to the specified direction.
02 measuring point / line / circle features
1. Simple implementation
The algorithm of measuring point / line / circle is based on edge detection, which is easy to implement.
2. Position following is required
The measuring device itself does not have positioning function. If the position of the detected product is not fixed, the corresponding position of the measuring device cannot be determined. At this time, it is necessary to rely on positioning functions such as matching for position tracking.
01 measuring point application scenario
1. Precise positioning
Detecting the position of feature edge points and outputting corresponding coordinates can achieve accurate positioning, which is often used in conjunction with matching (rough positioning).
2. Fitting straight line
A straight line can be fitted by detecting two feature edge points, and the straight line data can be output for further detection.
02 measuring line application scenario
1. Precise positioning
It is usually used to detect the intersection position coordinates of two straight lines as the positioning position. The output position accuracy is higher than that of matching output. It is often used in conjunction with matching (rough positioning).
2. Test straightness
The straightness can be judged according to the number of abnormal edges not on the straight line after fitting the straight line.
3. Measure dimensions
The edge dimension distance of the product can be obtained by detecting two straight lines and calculating the distance between the two straight lines.
03 application scenario of measuring circle
1. Measuring circle
Measure the circular features and obtain the center and radius of the circle.
2. Positioning
Through measuring the characteristics of the circle, the coordinate data of the center position is output for accurate positioning, which is often used in conjunction with matching (rough positioning).
3. Nine point calibration
The calibration coefficient can be calculated by detecting the image coordinate data of nine circle centers on the solid circle matrix calibration plate and the world coordinate data corresponding to the calibration plate.
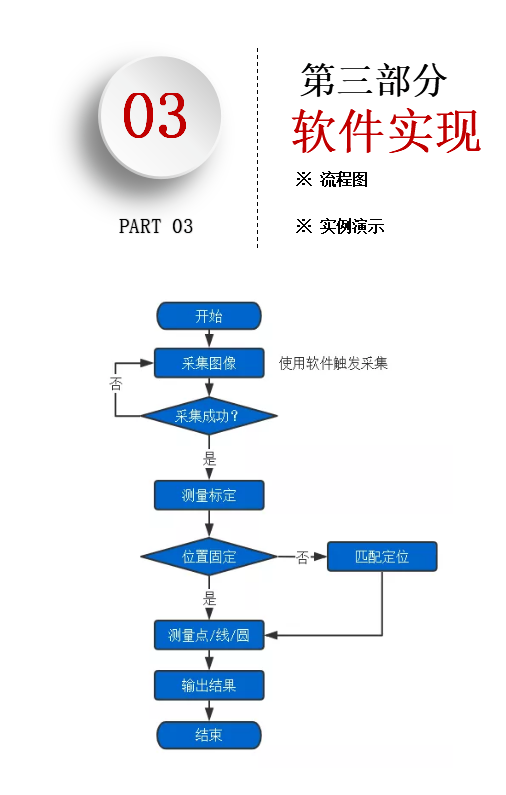
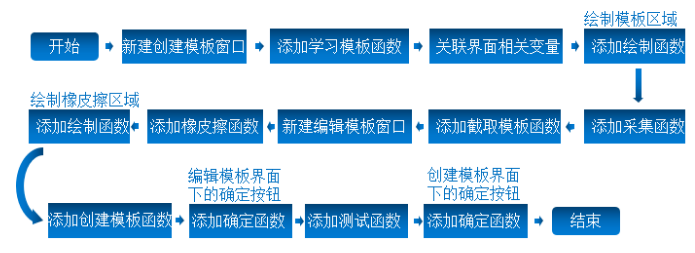
Flow chart of measuring point / line / circle
01 example demonstration
1. Open ZDevelop software: new project → new HMI file → new main Bas file, used to write interface response function → new global_variable.bas file is used to store global variables → create initparam Bas file is used to initialize measurement parameters → new camera Bas file is used to realize camera acquisition function → new draw Bas file is used to update the drawing graphic refresh interface → add the file to the project.
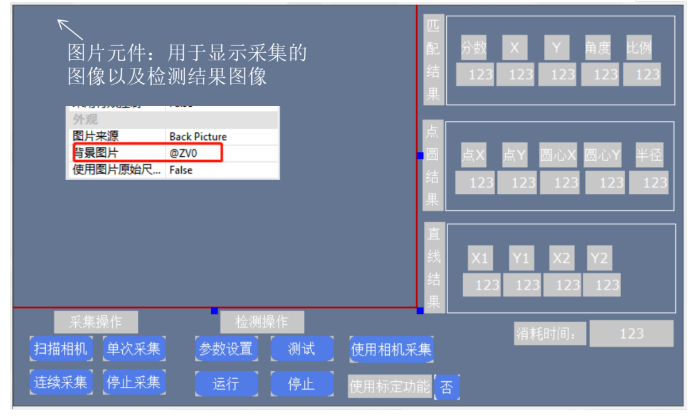
2. Design the operation interface. The operation interface only carries out image acquisition operation and detection execution operation, and displays the data results.
3. In global_ variable. The bas file is added to the global variable used.
'''''Most global variables use array structures''''' ''Note: basic Many functions in programming will TABLE(Data structure of system)As a parameter ''here table Are used as intermediate variables ''table 0-20 As an intermediate variable used in matching ''table 50-70 As roi Use of intermediate variables during drawing ''table 21-22,Represents the coordinate system of the mouse button control ''table 31-35,Represents the corresponding image coordinates after control coordinate conversion ''table 111-114,Represents the locator area roi Parameter, belonging to the control coordinate system ''table 121-124,Indicates the eraser area roi Parameter, belonging to the control coordinate system ''table 81-98,Represents the image coordinates of the nine points used for calibration ''table 131-148,Represents the world coordinates of the nine points used for calibration '***********Define program task related variables********************** 'Main task status '0 - uninitialized '1 - stop it '2 - In operation '3 - Stopping GLOBAL DIM main_task_state main_task_state = 1 'Calibration global is_ca_success 'Operation task switch GLOBAL DIM run_switch run_switch = 0 'Acquisition task switch '0 - Stop collection '1 - Request collection GLOBAL DIM grab_switch grab_switch = 0 'Location detection main task id - 10 GLOBAL DIM main_task_id main_task_id = 10 'Camera continuous acquisition thread id - 7 GLOBAL DIM grab_task_id grab_task_id = 7 '***********End defining program task related variables****************** '***********Define camera acquisition related variables********************** 'Camera type,"",Use Haikang camera here-"mvision" GLOBAL DIM CAMERA_TYPE(100) 'CAMERA_TYPE = "mindvision;basler;mvision;huaray;basler;zmotion" CAMERA_TYPE = "mvision" 'Number of cameras GLOBAL cam_num cam_num = 0 'Camera mode,-1 Continuous acquisition, 0-Trigger acquisition GLOBAL cam_mode cam_mode = 0 '***********End defining camera acquisition related variables****************** 'Define return to main interface flag,1-Returned, 0-Not returned GLOBAL DIM d_is_rtn_loc d_is_rtn_loc = 1 '***********Define template related variables************************* 'Define create template flag bit,1-Created template, 0-No template created GLOBAL DIM d_is_creModel d_is_creModel = 0 'Learning template parameters,starAngle,endAngle,minScale,maxScale,thresh,numlevel,reduce,angleStep,scaleStep GLOBAL DIM d_mod_param(9) '***********End defining template related variables********************** '***********Define and edit template related variables********************* 'Define edit template flags,0-Indicates that the template is not edited, 1-Represents an edit template GLOBAL DIM d_edit_m d_edit_m = 0 'Defines the use of eraser function flags,0-Indicates the area to be erased, 1-Indicates the erase area GLOBAL DIM d_isMask_m d_isMask_m = 1 'Defines the of the eraser roi Parameter, followed by the image coordinates of the upper left corner and the lower right corner of the rectangle x,y,x,y GLOBAL DIM d_locator_roi(4),d_eraser_roi(4) 'Define square eraser size width GLOBAL DIM d_eraser_size d_eraser_size = 5 'Defines the rectangular area of the eraser on the interface control GLOBAL DIM c_rect(4) 'Define mouse status flags,0-Indicates that the mouse is released, 1-Indicates that the mouse is pressed GLOBAL DIM d_mouse_s d_mouse_s = 0 '***********End defining and editing template related variables****************** '***********Define match detection related variables********************* 'Match detection parameters,minScore,matchNum,minDist,thresh,accuracy,speed,polor GLOBAL DIM d_match_param(7) 'To define a learning template roi Parameters and eraser roi Parameter, followed by the image coordinates of the upper left corner and the lower right corner of the rectangle x,y,x,y GLOBAL DIM d_locator_roi(4),d_eraser_roi(4) 'Matching results, score,x,y,angle,scale, At present, only the first target is saved for multi-target matching GLOBAL DIM d_match_rst(5) '***********End definition match detection related variables****************** 'Define variables that cache intermediate pictures and result pictures during program execution GLOBAL ZVOBJECT grabImg GLOBAL ZVOBJECT subImg,copy_subImg,colorSubImg, s_mod GLOBAL ZVOBJECT modRe '***********Define coordinate calibration related variables********************* 'Define whether to use the calibration function flag, 0-Do not use the calibration function, 1-Using the calibration function GLOBAL DIM d_use_calib d_use_calib = 0 'Define calibration success flag, 0-Calibration failed, 1-Calibration successful GLOBAL DIM d_calib_success d_calib_success = 0 'Calibration parameters GLOBAL ZVOBJECT ca_param 'Calibration parameter array, in order: calibration type, contrast, polarity, minimum area, maximum area and world coordinate point spacing GLOBAL DIM d_ca_param(6) 'd The beginning represents the data structure 'Calibration error, minimum error, maximum error, average error GLOBAL DIM ca_min_err,ca_max_err,ca_avg_err ca_min_err = 0 ca_max_err = 0 ca_avg_err = 0 'Common color variables GLOBAL C_RED, C_GREEN, C_BLUE, C_YELLOW C_RED = RGB(255, 0, 0) C_GREEN = RGB( 0,255, 0) C_BLUE = RGB( 0, 0,255) C_YELLOW= RGB(255,255, 0) 'Calibration matrix GLOBAL ZVOBJECT ca_mat '***********End defining coordinate calibration related variables****************** '***********Define measurement points/Line/Circle dependent variable****************** 'Define test consumption time GLOBAL DIM d_detect_time 'Define whether to use correction source,0-Do not use correction source, 1-Use correction source GLOBAL DIM d_use_locator ' 'Whether to draw the gauge GLOBAL DIM line_status,circle_status,point_status line_status=0 circle_status=0 point_status=0 'Measuring point/Line/Circle parameter settings, including edge polarity/Edge position/contrast ratio/Filter size/Number of scans/Scan width GLOBAL DIM d_point_param(4),d_line_param(6), d_circle_parm(6) 'Draw result parameters GLOBAL DIM draw_point(2),draw_line(4),draw_circle(3) '***********End defining measurement points/Line/Circle dependent variable************** 'Define point measurer area/Line gauge area/Circle gauge area GLOBAL DIM d_roi_rect1(5),d_roi_rect2(5),d_roi_arc(6) 'Set the base coordinates for creating the template GLOBAL DIM d_match_base_rst(5) GLOBAL ZVOBJECT mat_rigid,latch ' '**********************Point line circle measurement data results***************** GLOBAL DIM point_result(5),line_result(5),circle_result(5) '***********Define variables related to the function of reading local files************** ''Note that this function is only valid when using the emulator 'Defines whether to use local picture flags GLOBAL DIM d_use_imgfile 'Define local picture index GLOBAL DIM d_index 'Define the path to read pictures GLOBAL DIM File_Name(100) '***********End defining variables related to the function of reading local files********** RUN "Hmi1.hmi",1
4. In initparam Initialize the measurement variables in the bas file.
end
GLOBAL SUB init_meas_param() 'Initialization parameters
'Initialize locator roi parameter
d_locator_roi(0) = 240 'top left corner x
d_locator_roi(1) = 180 'top left corner y
d_locator_roi(2) = 400 'Lower right corner x
d_locator_roi(3) = 300 'Lower right corner y
'Initialize template parameters
d_mod_param(0) = -180 'Starting angle
d_mod_param(1) = 180 'Termination angle
d_mod_param(2) = 1 'Minimum zoom
d_mod_param(3) = 1 'Maximum zoom
d_mod_param(4) = 80 'threshold
d_mod_param(5) = 0 'Default pyramid layers
d_mod_param(6) = 0 'Default reduced feature point
d_mod_param(7) = 0 'Default angle step
d_mod_param(8) = 0 'Default zoom step
'Initialize matching measurement parameters
d_match_param(0) = 50 'Minimum score
d_match_param(1) = 1 'Number of matches
d_match_param(2) = 0 'Default minimum spacing
d_match_param(3) = 40 'Minimum threshold
d_match_param(4) = 0 'accuracy
d_match_param(5) = 9 'speed
d_match_param(6) = 0 'Polarity
'Initialize matching location results
d_match_rst(0) = 0 'fraction
d_match_rst(1) = 0 'position X
d_match_rst(2) = 0 'position Y
d_match_rst(3) = 0 'angle
d_match_rst(4) = 0 'proportion
'Initialization of measurement parameters of points
d_point_param(0)=0
d_point_param(1)=0
d_point_param(2)=30
d_point_param(3)=5
'Line measurement parameter initialization
d_line_param(0)=0
d_line_param(1)=0
d_line_param(2)=30
d_line_param(3)=5
d_line_param(4)=10
d_line_param(5)=8
'Initialization of measurement parameters of circle
d_circle_parm(0)=0
d_circle_parm(1)=0
d_circle_parm(2)=20
d_circle_parm(3)=5
d_circle_parm(4)=10
d_circle_parm(5)=8
'Initialize variables related to coordinate calibration
d_ca_param(0) = 0 'Calibration type
d_ca_param(1) = 120 'contrast ratio
d_ca_param(2) = 0 'Polarity
d_ca_param(3) = 80 'Minimum area
d_ca_param(4) = 20000 'Maximum area
d_ca_param(5) = 9 'World coordinate point spacing
ca_min_err = 0 'Minimum error
ca_max_err = 0 'maximum error
ca_avg_err = 0 'average error
d_detect_time = 0
d_use_locator = 0 'Correction source is not used by default
d_use_imgfile = 1
d_index = 0
TABLE(31,100,100,60,40,60,8,5) 'Point measurer initialization
TABLE(231,100,100,60,40,60,8,5) 'Line meter initialization
TABLE(551,100,100,60,50,0,360,8,5) 'Circle meter initialization
END SUB
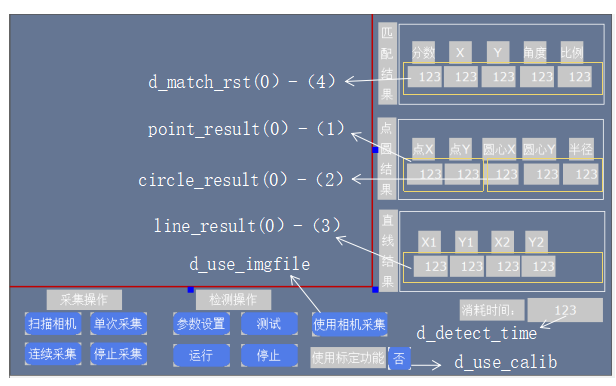
5. Associate relevant variables in the operation interface.
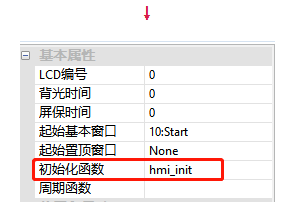
6. In main Add the running interface initialization function in the bas file and associate the HMI interface initialization function name.
'Run the interface initialization function, power on and execute it once
GLOBAL SUB hmi_init()
grab_switch = 0 'Initialize the acquisition task switch without starting the acquisition task
main_task_state = 1 'The main task status of initialization positioning detection is stop status 1
ZV_SETSYSINT("LineWidth",5) 'Set the paint brush width to 5 pixels
ZV_RESETCLIPSIZE(1280, 1024) 'During initialization, the clipping size of the region is set according to the image resolution, where the image resolution is 1280 x1024
ZV_LATCHSETSIZE(0, HMI_CONTROLSIZEX(10, 1), HMI_CONTROLSIZEY(10, 1)) 'Sets the size of the latch
init_meas_param() 'Initialize measurement parameters
ZV_IMGGENCONST(subImg,40,30,1,0,0) 'Initialize template sub image
'Define matching intermediate result variables
ZVOBJECT contlist1, tsContlist1, mat_rigid1
ZVOBJECT contlist2, tsContlist2, mat_rigid2
ZV_READIMAGE(grabImg,"\8\calib.bmp",1) 'read...\flash\8 Under directory calib.bmp Gray image, which is used for coordinate calibration when loading local image simulation
ZV_LATCHCLEAR(0) 'Clear latch channel 0
ZV_LATCH(grabImg,0) 'Displayed in latch channel 0
END SUB
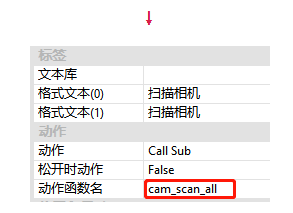
7. In camera Add the function function of collection related buttons in BAS file and associate the action function name.
end
'The function that responds when the scan camera button is pressed on the main interface
GLOBAL SUB cam_scan_all()
if(d_use_imgfile=1)then
?"Please press the use local picture button to turn off this function"
return
endif
ZV_SETSYSINT("LogLevel", 7) 'Set controller information
ZV_SETSYSSTR("DataDir","")
CAM_SCAN(CAMERA_TYPE) 'Scanning camera, CAMERA_TYPE="mvision"
cam_num = CAM_COUNT() 'Gets the number of cameras scanned
if (0 = cam_num) then 'If the number of cameras=0,Print prompt information
? "Camera not found"
return 'Exit the sub function without executing further
endif
?"cam_num = " cam_num 'If a camera is scanned, print the number of cameras
cam_mode = 0 'Set soft trigger acquisition
CAM_SEL(0) 'Select the first camera scanned to operate
CAM_SETEXPOSURE(5000) 'Set the camera exposure time to 5000 us
CAM_SETMODE(cam_mode) 'Set software trigger mode
CAM_START(0) 'Turn on the camera
END SUB
'The function executed by pressing the single acquisition button on the main interface
GLOBAL SUB btn_grab()
''If d_use_imgfile=1 The function of reading local pictures is only effective when using the simulator. Please comment out this part of the code when using the controller
if (d_use_imgfile=1) then
if(d_index=3) then
d_index=0
endif
File_Name="\8\"+TOSTR(d_index,1,0)+".bmp" '.../flash/3/The path name of the picture in the directory
ZV_IMGREAD(grabImg,File_Name,0)
ZV_LATCH(grabImg, 0)
d_index=d_index+1
return
endif
''End of reading local picture function
if cam_num = 0 then
?"Please scan the camera first!"
return
endif
CAM_SETPARAM("TriggerSoftware", 0) 'Send trigger instruction
CAM_GET(grabImg, 0) 'Get a frame of image and store it in grabImg Variable
ZV_LATCH(grabImg, 0) 'Displays the image in latch channel 0
END SUB
'The main interface is the function to respond by pressing the continuous acquisition button
GLOBAL SUB btn_cgrab()
if grab_switch =1 then 'If it is already in the continuous execution state, print the prompt message and exit the function
?"It is running continuously. Please do not repeat the operation!"
return
endif
if( d_use_imgfile =0) then
if cam_num = 0 then 'If the number of cameras=0,Print a prompt and exit the function
?"Please scan the camera first!"
return
endif
endif
grab_switch = 1 'Set the acquisition task switch to 1
if (1 = grab_switch) then
if (0 = PROC_STATUS(grab_task_id)) then
RUNTASK grab_task_id, grab_task 'Start continuous acquisition task
endif
endif
END SUB
'Acquisition task implementation function
grab_task:
while(1)
if (0 = grab_switch) then 'If the acquisition task switch=0 That is, when the stop acquisition button is pressed
exit while 'Exit loop
endif
'Repeat the following
btn_grab()
wend
END
'Response function of pressing the stop acquisition button on the main interface
GLOBAL SUB btn_stopCgrab()
if grab_switch =0 then 'If the collection is stopped, print the prompt and exit the function
?"Continuous acquisition is not enabled!"
return
endif
grab_switch = 0 'Set the acquisition task switch to 0
END SUB
8. Create a new operation interface, press the [parameter setting] button to pop up the parameter setting window, and design the interface layout.
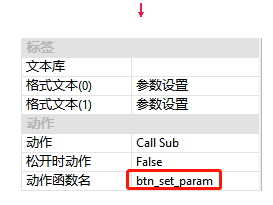
9. Add the function that responds when the [parameter setting] button is pressed in the operation interface, and associate the action function name.
'Response function when the parameter setting button is pressed on the operation interface
GLOBAL SUB btn_set_param()
ZV_LATCHSETSIZE(0, HMI_CONTROLSIZEX(11, 1), HMI_CONTROLSIZEY(11, 1)) 'Sets the size of the latch
ZV_LATCHCLEAR(0)
ZV_LATCH(grabImg,0) 'Displayed in latch channel 0 as the background picture of the display area
HMI_SHOWWINDOW(11)
END SUB
10. Refer to Chapter III "visual positioning based on shape matching" to add shape matching function. The adding process is as follows:
end
'And draw(That is, select ROI)The relevant interface refresh drawing functions are placed in this bas In the document
DIM is_redraw 'Drawing flag, 0 means no drawing, 1 means drawing
is_redraw = 0
DIM sr_mpos_x, sr_mpos_y, hit_pos
'The response function when the learning template button is pressed on the main interface
GLOBAL SUB btn_sel_loc()
ZV_LATCHSETSIZE(0, HMI_CONTROLSIZEX(12, 60), HMI_CONTROLSIZEY(12, 60)) 'Sets the latch size of the create template window latch channel 0
ZV_LATCHSETSIZE(1, HMI_CONTROLSIZEX(12, 38), HMI_CONTROLSIZEY(12, 38)) 'Sets the latch size of latch channel 1 of the create template window
SET_COLOR(RGB(0,255,0)) 'appoint draw The color used by the command
ZV_LATCHCLEAR(0) 'Clear latch channel 0
ZV_LATCH(grabImg, 0) 'Display the acquired image and display it in latch channel 0
ZV_LATCH(colorSubImg, 1) 'The display template image is displayed in latch channel 1
'image roi Coordinate conversion control roi
is_redraw = 0
d_is_rtn_loc = 0
TABLE(111, d_locator_roi(0), d_locator_roi(1),d_locator_roi(2),d_locator_roi(3))
ZV_POSFROMIMG(0, 2, 111, 111) 'Convert image coordinates to HMI Control coordinates
HMI_SHOWWINDOW(12)
END SUB
'Update the area of the locator according to the mouse operation, that is, the effective area of the learning template
GLOBAL SUB update_locator()
if mouse_scan(21) = 1 then 'Scan mouse down operation
is_set_roi_m_down = 1
sr_mpos_x = table(21)
sr_mpos_y = table(22)
hit_pos = ZV_HMIADJRECT(sr_mpos_x, sr_mpos_y, 111, -1) 'The hit position can be changed only when pressed
is_redraw = 1
endif
if mouse_scan(21) = -1 then 'Scan mouse release operation
is_set_roi_m_down = 0
sr_mpos_x = table(21)
sr_mpos_y = table(22)
ZV_HMIADJRECT(sr_mpos_x, sr_mpos_y, 111, hit_pos)
is_redraw = 1
endif
if (is_set_roi_m_down and MOUSE_state(21)) then
sr_mpos_x = table(21)
sr_mpos_y = table(22)
ZV_HMIADJRECT(sr_mpos_x, sr_mpos_y, 111, hit_pos)
is_redraw = 1
endif
if (1 = is_redraw) then
'control roi Coordinate to image roi coordinate
is_redraw = 0
ZV_POSTOIMG(0, 2, 111, 50) 'TABLE(50)Used temporarily as an intermediate variable
d_locator_roi(0) = TABLE(50)
d_locator_roi(1) = TABLE(51)
d_locator_roi(2) = TABLE(52)
d_locator_roi(3) = TABLE(53)
SET_REDRAW
endif
END SUB
'Draws a locator based on the updated mouse position coordinates roi
GLOBAL SUB draw_locator()
DRAWRECT(TABLE(111), TABLE(112), TABLE(113), TABLE(114))
local cx,cy
cx = (TABLE(111) + TABLE(113)) / 2
cy = (TABLE(112) + TABLE(114)) / 2
DRAWLINE(cx-5, cy, cx+5, cy) 'Center cross
DRAWLINE(cx, cy-5, cx, cy+5)
END SUB
'The function to respond after pressing the intercept template button in the create template interface
GLOBAL SUB btn_getSubImg()
LOCAL mod_w,mod_h
ZV_IMGGETSUB(grabImg, subImg, d_locator_roi(0), d_locator_roi(1), d_locator_roi(2)-d_locator_roi(0)+1, d_locator_roi(3)-d_locator_roi(1)+1)
ZV_IMGINFO(subImg,0)
mod_w = TABLE(0)
mod_h = TABLE(1)
ZV_REGENRECT(modRe,0,0,mod_w, mod_h)
ZV_LATCHCLEAR(1)
ZV_LATCH(subImg, 1)
END SUB
'The function that responds when the eraser button is pressed in the create template interface
GLOBAL SUB btn_sel_erase()
ZV_LATCHSETSIZE(1, HMI_CONTROLSIZEX(13, 1), HMI_CONTROLSIZEY(13, 1)) 'Sets the size of the latch
ZV_LATCHSETSIZE(2, HMI_CONTROLSIZEX(13, 15), HMI_CONTROLSIZEY(13, 15)) 'Sets the size of the latch
SET_COLOR(RGB(0,255,0)) 'Sets the color used by the brush when drawing
ZV_LATCHCLEAR(1) 'Clear latch
ZV_IMGCOPY(subImg, copy_subImg) 'Copy template sub image to copy_subImg In image variable
ZV_REGION(copy_subImg, modRe, 1, 0) 'Draw on template image modRe The non effective area of the image, drawn in black, used for masking
ZV_LATCH(copy_subImg, 1) 'Show copied template diagram
HMI_SHOWWINDOW(13) 'Open the edit template window
end sub
'Update eraser according to mouse operation/Location of the recovery area
GLOBAL SUB update_eraser()
DIM c_size_eraser 'The size of the eraser on the control
DIM eraser_pos_x,eraser_pos_y
d_mouse_s = MOUSE_STATE(21) 'When the mouse is pressed
eraser_pos_x = TABLE(21)
eraser_pos_y = TABLE(22)
c_size_eraser = ZV_LENFROMIMG(0, d_eraser_size) 'Converts the image size of the eraser to the control size
c_rect(0, eraser_pos_x - c_size_eraser, eraser_pos_y - c_size_eraser, eraser_pos_x + c_size_eraser, eraser_pos_y + c_size_eraser)
'Draw to(eraser_pos_x,eraser_pos_y)Center, 2*c_size_eraser Square eraser area with side length
DIM hmi_w,hmi_h
if (eraser_pos_x >= c_size_eraser) and (eraser_pos_y >= c_size_eraser) and (eraser_pos_x <= HMI_CONTROLSIZEX(12, 1) - c_size_eraser)and (eraser_pos_y <= HMI_CONTROLSIZEy(12, 1) - c_size_eraser) THEN
SET_REDRAW(0,0, HMI_CONTROLSIZEX(12, 1), HMI_CONTROLSIZEY(12, 1))'Redraws the latch channel 0 area on the edit template window
endif
if d_mouse_s = 1 and d_edit_m = 1 then 'If the mouse is pressed and the template flag is edited=1 Time
btn_pro_eraser() 'Execute processing eraser function
endif
END SUB
'Handle eraser function
global sub btn_pro_eraser()
ZVOBJECT tmp_re
TABLE(121, c_rect(0), c_rect(1))
ZV_POSTOIMG(1, 1, 121, 121)
ZV_REGENRECT(tmp_re, TABLE(121), TABLE(122), 2 * d_eraser_size + 1, 2 * d_eraser_size + 1)
if (d_isMask_m = 1) then 'shield
ZV_REDIFF(modRe, tmp_re, modRe) 'calculation modRe and tmp_re And save it to modRe in
else 'recovery
ZV_REUNION(modRe, tmp_re, modRe) 'calculation modRe and tmp_re Union and save to modRe in
endif
ZV_IMGCOPY(subImg, copy_subImg) 'Copy template sub image to copy_subImg In image variable
ZV_REGION(copy_subImg, modRe, 1, 0) 'Draw on template image modRe The non effective area of the image, drawn in black, used for masking
ZV_LATCH(copy_subImg, 1) 'Show copied template diagram
end sub
'Update paint eraser area
GLOBAL SUB draw_eraser()
if d_edit_m = 0 then 'If you edit a template flag
return 'Return sub function, do not continue to execute
endif
DRAWRECT(c_rect(0), c_rect(1), c_rect(2), c_rect(3))'Draw eraser area
END SUB
'The function that responds when the create template button is pressed in the edit template interface
GLOBAL SUB btn_loc_creModel()
d_is_creModel = 1
'Create template
ZV_SHAPECREATERE(subImg, modRe,s_mod, d_mod_param(0), d_mod_param(1), d_mod_param(2), d_mod_param(3), d_mod_param(4), d_mod_param(5), d_mod_param(6), d_mod_param(7), d_mod_param(8))
ZV_SHAPECONTOURS(s_mod, contlist1, 0) 'Get the template outline on the pyramid of level 0
ZV_GRAYTORGB(subImg, colorSubImg) 'Gray image conversion to RGB chart
ZV_IMGINFO(colorSubImg, 0) 'obtain colorSubImg Image information and store it in table0 in
ZV_GETRIGIDVECTOR(mat_rigid1, 0, 0, 0, TABLE(0)/2, TABLE(1)/2, 0)'Calculating rigid transformation matrix
ZV_CONTAFFINE(contlist1, mat_rigid1, tsContlist1) 'Affine transformation of contour or contour sequence
ZV_CONTLIST(colorSubImg, tsContlist1, ZV_COLOR(0, 255, 0), 0) 'stay colorSubImg Draw a green contour sequence on the image
ZV_LATCHCLEAR(2)
ZV_LATCH(colorSubImg, 2)
btn_loc_test()
d_match_base_rst(0) = d_match_rst(0)
d_match_base_rst(1) = d_match_rst(1)
d_match_base_rst(2) = d_match_rst(2)
d_match_base_rst(3) = d_match_rst(3)
d_match_base_rst(4) = d_match_rst(4)
END SUB
'The function executed when the OK button is pressed in the edit template interface
GLOBAL SUB btn_erase_cfm()
ZV_LATCHCLEAR(0)
ZV_LATCH(grabImg, 0) 'Display image on latch
HMI_CLOSEWINDOW(13) 'Close the edit template window
END SUB
'The function that responds when the test button is pressed in the create template interface
GLOBAL SUB btn_loc_test()
if (d_is_creModel = 0) then
?"No template created!"
return
endif
'Start matching
ZVOBJECT match_rst, sImg, colorImg
ZV_GAUSSBLUR(grabImg, sImg, 3)
ZV_SHAPEFIND(s_mod, sImg, match_rst, d_match_param(0), d_match_param(1), d_match_param(2), d_match_param(3), d_match_param(4), d_match_param(5), d_match_param(6))
ZV_MATINFO(match_rst, 0)
ZV_GRAYTORGB(sImg, colorImg)
if TABLE(0) > 0 then
local rowr
for rowr = 0 to TABLE(0)-1
ZV_MATGETROW(match_rst, rowr, 5, 3) 'obtain match_rst The second in the matrix rowr Row data to table in,table Maximum length 5
if(rowr = 0) then
if(is_ca_success = 1 AND d_use_calib=1) then
ZV_CALTRANSW(ca_param, TABLE(4),TABLE(5),8) 'Pixel coordinates to world coordinates
d_match_rst(0) = TABLE(3)
d_match_rst(1) = TABLE(8)
d_match_rst(2) = TABLE(9)
d_match_rst(3) = TABLE(6)
d_match_rst(4) = TABLE(7)
ZV_GETRIGIDVECTOR(mat_rigid1, 0, 0, 0, TABLE(4), TABLE(5), TABLE(6))'Calculating rigid transformation matrix
ZV_CONTAFFINE(contlist1, mat_rigid1, tsContlist1)'Affine transformation of contour or contour sequence
ZV_CONTLIST(colorImg, tsContlist1, ZV_COLOR(0, 255, 0), 0)'stay colorSubImg Draw a green contour sequence on the image
else
d_match_rst(0) = TABLE(3)
d_match_rst(1) = TABLE(4)
d_match_rst(2) = TABLE(5)
d_match_rst(3) = TABLE(6)
d_match_rst(4) = TABLE(7)
ZV_GETRIGIDVECTOR(mat_rigid1, 0, 0, 0, TABLE(4), TABLE(5), TABLE(6))'Calculating rigid transformation matrix
ZV_CONTAFFINE(contlist1, mat_rigid1, tsContlist1)'Affine transformation of contour or contour sequence
ZV_CONTLIST(colorImg, tsContlist1, ZV_COLOR(0, 255, 0), 0)'stay colorSubImg Draw a green contour sequence on the image
endif
endif
next
else
d_match_rst(0) = -1
d_match_rst(1) = -1
d_match_rst(2) = -1
d_match_rst(3) = -1
d_match_rst(4) = -1
endif
ZV_LATCH(colorImg, 0)
END SUB
'The function that responds when the OK button is pressed in the create template interface
GLOBAL SUB btn_loc_cfm()
grab_switch = 0 'Turn off continuous acquisition of correction source
d_is_rtn_loc = 1
ZV_LATCHSETSIZE(0, HMI_CONTROLSIZEX(11, 1), HMI_CONTROLSIZEY(11, 1)) 'Sets the size of the latch
ZV_LATCHCLEAR(0)
ZV_LATCH(grabImg, 0) 'Display image on latch
ZV_LATCH(grabImg, 1) 'Display image on latch
HMI_CLOSEWINDOW(12)
END SUB
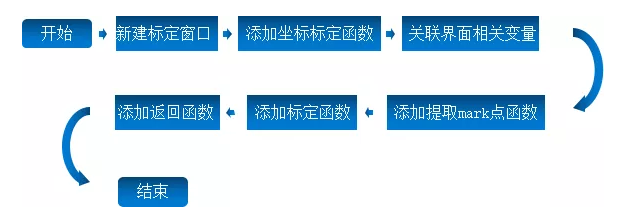
11. Refer to Chapter 6 "calibration" and add the coordinate calibration function. The adding process is as follows:
'Response function when the coordinate calibration button is pressed in the parameter setting interface
GLOBAL SUB btn_calib()
ZV_LATCHSETSIZE(0, HMI_CONTROLSIZEX(14, 91), HMI_CONTROLSIZEY(14, 91)) 'Sets the latch size of the coordinate calibration window latch channel 0
ZV_LATCHCLEAR(0) 'Clear latch channel 0
ZV_LATCH(grabImg, 0) 'Display the acquired image and display it in latch channel 0
HMI_SHOWWINDOW(14)
END SUB
'Press extract on the coordinate calibration interface mark Function that responds when a button is clicked
GLOBAL SUB btn_ca_extract()
ZVOBJECT inppts, ppts, wpts
'Extract pixel coordinates
ZV_CALGETSCAPTS(grabImg, inppts, d_ca_param(1), d_ca_param(2), d_ca_param(3), d_ca_param(4))
ZV_MATINFO (inppts, 400)
DIM row,col
row = TABLE(400)
col = TABLE(401)
if(row * col = 18) then
TABLE(150) = 1 'extract mark Point success
else
TABLE(150) = 0 'extract mark Point failure
return
endif
'according to mrak Calculate world coordinates by point spacing and pixel coordinates
ZV_CALGETPTSMAP(inppts,ppts,wpts,d_ca_param(5))
ZV_MATINFO (ppts, 400)
row = TABLE(400)
col = TABLE(401)
if(row * col = 18) then
TABLE(150) = 1 'extract mark Point success
else
TABLE(150) = 0 'extract mark Point failure
return
endif
'Pixel coordinates and world coordinates table in
DIM i
FOR i=0 TO row-1
ZV_MATGETROW (ppts, i, col, 81 + i*col)
ZV_MATGETROW (wpts, i, col, 131 + i*col)
NEXT
'Settings for drawing mark Point image
ZVOBJECT color
ZV_GRAYTORGB(grabImg, color)
'And draw mark Dot the cross
DIM j, pixNum 'Number of pixels
pixNum = 0
FOR i=0 TO 2
FOR j=0 TO 2
ZV_MARKER(color, TABLE(81 + 2 * pixNum), TABLE(81 + 2 * pixNum + 1), 0, 40, C_GREEN)
pixNum = pixNum + 1
NEXT
NEXT
'Draw with text mark Sequence number of points
FOR i=0 TO 8
ZV_TEXT (color, TOSTR(i,1,0), TABLE(81+2*i)-20, TABLE(81+2*i +1)-40, 20, C_BLUE)
NEXT
ZV_LATCH(color, 0)
END SUB
'Coordinate calibration interface is a function of response when the calibration button is pressed
GLOBAL SUB btn_ca_calib()
ZV_IMGINFO(grabImg,0)
ZV_CALCAM(ppts,wpts,ca_param,TABLE(0),TABLE(1),d_ca_param(0))
is_ca_success=1
'Calculate calibration error
ZV_CALERROR(ca_param, ppts, wpts, 0)
ca_min_err = TABLE(1)
ca_max_err = TABLE(2)
ca_avg_err = TABLE(0)
END SUB
'The function that responds when the return button is pressed on the coordinate calibration interface
GLOBAL SUB btn_ca_param_rtn()
HMI_CLOSEWINDOW(14)
END SUB
12.In the parameter setting interface, the [collect image] button is associated with the action function name btn_grab.
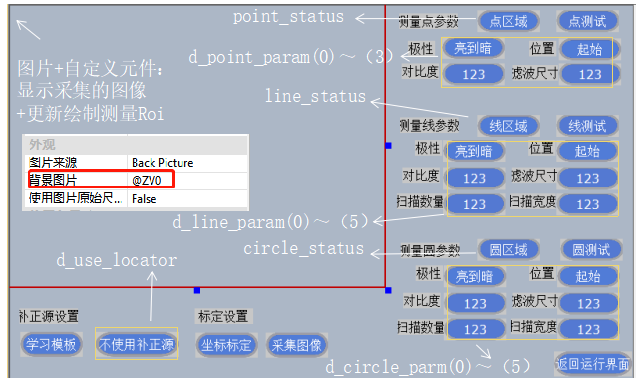
13.stay draw.bas Add points to file/Line/Update the drawing function of the circle gauge area and associate the refresh function and drawing function in the custom component properties window.
'Refresh function of point, line and circle measurer
GLOBAL SUB update_roi ()
if point_status = 1 then
SET_REDRAW 'Draw the first click
if (mouse_scan(21) = 1 ) then 'Scan press operation
hit_pos = ZV_HMIADJRECT2(table(21), table(22), 31, -1) 'The hit position can be changed only when pressed
is_redraw = 1
endif
if (mouse_scan(21) = -1 ) then 'Scan release operation
ZV_HMIADJRECT2(table(21), table(22), 31, hit_pos)
is_redraw = 1
endif
if (MOUSE_state(21)) then
ZV_HMIADJRECT2(table(21), table(22), 31, hit_pos)
is_redraw = 1
endif
if (1 = is_redraw) then
is_redraw = 0
ZV_POSTOIMG(0, 1, 31, 41)
d_roi_rect1(0) = TABLE(41)
d_roi_rect1(1) = TABLE(42)
d_roi_rect1(2) = ZV_LENTOIMG(0, TABLE(33))
d_roi_rect1(3) = ZV_LENTOIMG(0, TABLE(34))
d_roi_rect1(4) = TABLE(35)
SET_REDRAW
endif
elseif line_status=1 then
SET_REDRAW 'Draw the first click
if (mouse_scan(21) = 1)then 'Scan press operation
hit_pos = ZV_HMIADJRECT2(table(21), table(22),231, -1) 'The hit position can be changed only when pressed
is_redraw = 1
endif
if (mouse_scan(21) = -1) then 'Scan release operation
ZV_HMIADJRECT2(table(21), table(22), 231, hit_pos)
is_redraw = 1
endif
if (MOUSE_state(21)) then
ZV_HMIADJRECT2(table(21), table(22), 231, hit_pos)
is_redraw = 1
endif
if (1 = is_redraw) then
is_redraw = 0
ZV_POSTOIMG(0, 1, 231, 41)
d_roi_rect2(0) = TABLE(41)
d_roi_rect2(1) = TABLE(42)
d_roi_rect2(2) = ZV_LENTOIMG(0, TABLE(233))
d_roi_rect2(3) = ZV_LENTOIMG(0, TABLE(234))
d_roi_rect2(4) = TABLE(235)
SET_REDRAW
endif
elseif circle_status=1 then
SET_REDRAW
is_redraw = 0
if (mouse_scan(21) = 1 AND TABLE(21)>0 AND TABLE(21)0 AND TABLE(22)
hit_pos = ZV_HMIADJARC(table(21), table(22), 551, -1) 'The hit position can be changed only when pressed
is_redraw = 1
endif
if (mouse_scan(21) = -1 AND TABLE(21)>0 AND TABLE(21)0 AND TABLE(22)
ZV_HMIADJARC(table(21), table(22), 551, hit_pos)
is_redraw = 1
endif
if (MOUSE_state(21)) then
ZV_HMIADJARC(table(21), table(22), 551, hit_pos)
is_redraw = 1
endif
if (1 = is_redraw) then
is_redraw = 0
'Control coordinates to image coordinates
ZV_POSTOIMG(0, 1, 551, 61)
TABLE(63) = ZV_LENTOIMG(0, TABLE(553))
TABLE(64) = ZV_LENTOIMG(0, TABLE(554))
TABLE(65, TABLE(555), TABLE(556))
d_roi_arc(0) = TABLE(61)
d_roi_arc(1) = TABLE(62)
d_roi_arc(2) = TABLE(63)
d_roi_arc(3) = TABLE(64)
d_roi_arc(4) = TABLE(65)
d_roi_arc(5) = TABLE(66)
SET_REDRAW
endif
else
SET_REDRAW
endif
END SUB
'Drawing function of point, line and circle
GLOBAL SUB draw_roi()
if point_status = 1 and line_status=0 and circle_status=0 then
SET_COLOR(C_BLUE)
ZV_HMIRECT2(31, 300)
DRAWLINE(TABLE(300), TABLE(301), TABLE(302), TABLE(303)) 'Outer rectangle
DRAWLINE(TABLE(302), TABLE(303), TABLE(304), TABLE(305))
DRAWLINE(TABLE(304), TABLE(305), TABLE(306), TABLE(307))
DRAWLINE(TABLE(306), TABLE(307), TABLE(300), TABLE(301))
DRAWLINE(TABLE(308), TABLE(309), TABLE(310), TABLE(311)) 'Direction arrow
DRAWLINE(TABLE(312), TABLE(313), TABLE(310), TABLE(311))
DRAWLINE(TABLE(314), TABLE(315), TABLE(310), TABLE(311))
endif
if line_status=1 and point_status=0 and circle_status=0 then
SET_COLOR(C_BLUE)
TABLE(236,d_line_param(4),d_line_param(5)) 'Measuring the number and width of scans
ZV_HMIRECT2(231, 350)
DRAWLINE(TABLE(350), TABLE(351), TABLE(352), TABLE(353)) 'Outer rectangle
DRAWLINE(TABLE(352), TABLE(353), TABLE(354), TABLE(355))
DRAWLINE(TABLE(354), TABLE(355), TABLE(356), TABLE(357))
DRAWLINE(TABLE(356), TABLE(357), TABLE(350), TABLE(351))
DRAWLINE(TABLE(358), TABLE(359), TABLE(360), TABLE(361)) 'Direction arrow
DRAWLINE(TABLE(362), TABLE(363), TABLE(360), TABLE(361))
DRAWLINE(TABLE(364), TABLE(365), TABLE(360), TABLE(361))
if (0 = TABLE(366)) then return
SET_COLOR(C_GREEN)
DIM idx
for idx = 0 to TABLE(366)-1
DRAWLINE(TABLE(367+idx*4), TABLE(368+idx*4), TABLE(369+idx*4), TABLE(370+idx*4))
next
endif
if circle_status=1 and line_status=0 and point_status=0 then
SET_COLOR(C_BLUE)
TABLE(557) = d_circle_parm(4) 'Number of sub regions
TABLE(558) = d_circle_parm(5) 'Sub area width
ZV_HMIARC(551, 400) 'Draw a ring
'Draw an arc
DRAWARC(TABLE(400), TABLE(401), TABLE(402), TABLE(404), TABLE(405)) 'Inner radius
DRAWARC(TABLE(400), TABLE(401), TABLE(403), TABLE(404), TABLE(405)) 'Outer radius
DRAWLINE(TABLE(400), TABLE(401)-5, TABLE(400), TABLE(401)+5)
DRAWLINE(TABLE(400)-5, TABLE(401), TABLE(400)+5, TABLE(401))
'Draw boundary lines
DIM idx
for idx = 0 to TABLE(406)-1
DRAWLINE(TABLE(407+idx*4), TABLE(408+idx*4), TABLE(409+idx*4), TABLE(410+idx*4))
next
SET_COLOR(C_GREEN)
DIM startid
startid = 407+TABLE(406)*4
for idx = 0 to TABLE(startid)-1
DRAWLINE(TABLE(startid+1+idx*4), TABLE(startid+2+idx*4), TABLE(startid+3+idx*4), TABLE(startid+4+idx*4))
next
endif
END SUB
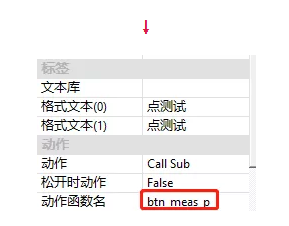
14. In main In the bas file, add the function that responds when the [point test] button is pressed in the parameter setting interface, and associate the action function name.
'Function of response when point measurement button is pressed on parameter interface
GLOBAL SUB btn_meas_p()
Point_measure()
ZV_GRAYTORGB(grabImg, latch) 'Before drawing graphics, you need to convert the gray image to RGB chart
ZV_MARKER(latch, draw_point(0), draw_point(1), 0, 20, C_GREEN) 'Draw marker points
ZV_LATCH(latch,0)'Display image results
END SUB
'Implementation sub function of measurement point
GLOBAL SUB Point_measure()
ZVOBJECT mr_p, tmp
if d_use_locator=0 then 'If no correction source is used
'Generate rectangular gauge
ZV_MRGENRECT2(mr_p, d_roi_rect1(0), d_roi_rect1(1),d_roi_rect1(2), d_roi_rect1(3),d_roi_rect1(4), 1)
endif
'Detection point
ZV_MRPOS(mr_p, grabImg,tmp,d_point_param(3),d_point_param(2),d_point_param(0),d_point_param(1))
'Get the data of the corresponding row of the matrix
ZV_MATGETROW(tmp, 0, 3, 386)
'Assign a result variable to draw a graph
draw_point(0)=TABLE(386)
draw_point(1)=TABLE(387)
if d_use_calib=1 and is_ca_success=1 then 'If the calibration function is used and the calibration has been successful
ZV_CALTRANSW(ca_param, TABLE(386),TABLE(387),386) 'Pixel coordinates to world coordinates
endif
'The assignment result variable is used to display the data result
point_result(0)=TABLE(386)
point_result(1)=TABLE(387)
END SUB
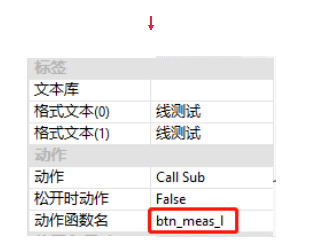
15. In main In the bas file, add the function that responds when the [line test] button is pressed in the parameter setting interface, and associate the action function name.
Response function when the offline measurement button is pressed in the parameter interface
GLOBAL SUB btn_meas_l()
btn_ml_test()
ZV_GRAYTORGB(grabImg, latch)'Before drawing graphics, you need to convert the gray image to RGB chart
ZV_LINE(latch,draw_line(0),draw_line(1),draw_line(2),draw_line(3),zv_color(0,255,0)) 'Draw line
ZV_LATCH(latch,0)'Display image results
END SUB
'Realization sub function of measuring straight line
GLOBAL SUB btn_ml_test()
ZVOBJECT mr_l, tmp
if d_use_locator=0 then 'If no correction source is used
'Generate a linear measurer
ZV_MRGENLINE(mr_l,d_roi_rect2(0), d_roi_rect2(1),d_roi_rect2(2), d_roi_rect2(3), d_roi_rect2(4), 1,d_line_param(4),d_line_param(5))
endif
'Set advanced parameters of the meter area, including filter size, edge threshold, edge polarity and edge position
ZV_MRSETADV(mr_l, d_line_param(3), d_line_param(2), d_line_param(0),d_line_param(1))
'Initialize result array
TABLE(486, 0, 0, 0, 0)
'Detect the line and assign the result to the array with the starting address of 486
ZV_MRLINE(mr_l, grabImg, tmp, 486)
'Assign a result variable to draw a graph
draw_line(0)=TABLE(486)
draw_line(1)=TABLE(487)
draw_line(2)=TABLE(488)
draw_line(3)=TABLE(489)
if d_use_calib=1 and is_ca_success=1 then 'If the calibration function is used and the calibration has been successful
ZV_CALTRANSW(ca_param, TABLE(486),TABLE(487),486) 'Pixel coordinates to world coordinates
ZV_CALTRANSW(ca_param, TABLE(488),TABLE(489),488) 'Pixel coordinates to world coordinates
endif
'The assignment result variable is used to display the data result
line_result(0)=TABLE(486)
line_result(1)=TABLE(487)
line_result(2)=TABLE(488)
line_result(3)= TABLE(489)
END SUB
16. Add in main Add the function in the parameter setting interface when pressing the [circle test] button in the bas file, and associate the action function name.
'Function of response when the circle measurement button is pressed on the parameter interface
GLOBAL SUB btn_meas_c()
btn_mc_test()'Measurement circle realization subfunction
ZV_GRAYTORGB(grabImg, latch)'Before drawing graphics, you need to convert the gray image to RGB chart
ZV_CIRCLE(latch, draw_circle(0),draw_circle(1),draw_circle(2), C_GREEN)'Draw circle
ZV_LATCH(latch,0)'Display image results
END SUB
'Implementation of sub function of measuring circle
GLOBAL SUB btn_mc_test()'Measuring circle
ZVOBJECT mr_c, tmp
if d_use_locator=0 then
'Generate ring gauge
ZV_MRGENCIRCLE(mr_c,d_roi_arc(0), d_roi_arc(1), d_roi_arc(2), d_roi_arc(3),d_roi_arc(4),d_roi_arc(5), 1, d_circle_parm(4),d_circle_parm(5))
endif
'Set the measurement parameters, including filter size, edge threshold, edge polarity and edge position
ZV_MRSETADV(mr_c,d_circle_parm(3), d_circle_parm(2), d_circle_parm(0),d_circle_parm(1))
'Initialize result array
TABLE(586, 0, 0, 0)
'Measure the circle and assign the result to the array with starting address 586
ZV_MRCIRCLE(mr_c, grabImg, tmp, 586)
'Assign a result variable to draw a graph
draw_circle(0)=TABLE(586)
draw_circle(1)=TABLE(587)
draw_circle(2)=TABLE(588)
if d_use_calib=1 and is_ca_success=1 then 'If the calibration function is used and the calibration has been successful
ZV_CALTRANSW(ca_param, TABLE(586),TABLE(587),590) 'Pixel coordinates to world coordinates
ZV_CALTRANSW(ca_param, TABLE(586)+TABLE(588),TABLE(587),592) 'Coordinates of circle center plus radius
'Assign the calibration result variable to display the data result
circle_result(0)=TABLE(590)
circle_result(1)=TABLE(591)
'The radius is equal to the distance between the center point of the circle and the point on the circle
circle_result(2)=ZV_DISTPP(TABLE(590),TABLE(591),TABLE(592),TABLE(593))
ZV_LATCH(grabImg, 0)
RETURN
endif
'Assign a pixel result variable to display the data result
circle_result(0)=TABLE(586)
circle_result(1)=TABLE(587)
circle_result(2)=TABLE(588)
END SUB
17. In main In the bas file, add the function that responds when the [return to operation interface] button is pressed in the parameter setting interface, and associate the action function name.
'The function that responds when the return to operation button is pressed in the parameter setting interface GLOBAL SUB btn_goto_main() HMI_CLOSEWINDOW(11) END SUB
18. Add the function that responds when the [test] button is pressed in the operation interface, and associate the action function name.
'Function to respond when the test button is pressed on the operation interface
GLOBAL SUB btn_test()
TICKS=0'Start timing
if(d_use_locator=1) then 'If correction source is used
btn_loc_test() 'location
endif
btn_measure_test() 'Measuring point/Line/circular
d_detect_time=ABS(TICKS)'Calculate detection time consumption
END SUB
'Function to respond when the test button is pressed on the operation interface
GLOBAL SUB btn_test()
TICKS=0'Start timing
if(d_use_locator=1) then 'If correction source is used
btn_loc_test() 'location
endif
btn_measure_test() 'Measuring point/Line/circular
d_detect_time=ABS(TICKS)'Calculate detection time consumption
END SUB
'Point line circle simultaneous test subfunction
GLOBAL SUB btn_measure_test()
if d_use_locator=1 then 'If correction source is used
'Initialize the gauge
ZV_MRGENRECT2(mr_p, d_roi_rect1(0), d_roi_rect1(1),d_roi_rect1(2), d_roi_rect1(3),d_roi_rect1(4), 1)
ZV_MRGENLINE(mr_l,d_roi_rect2(0), d_roi_rect2(1),d_roi_rect2(2), d_roi_rect2(3), d_roi_rect2(4), 1,d_line_param(4),d_line_param(5))
ZV_MRGENCIRCLE(mr_c,d_roi_arc(0), d_roi_arc(1), d_roi_arc(2), d_roi_arc(3),d_roi_arc(4),d_roi_arc(5), 1, d_circle_parm(4),d_circle_parm(5))
'Calculating rigid transformation matrix
ZV_GETRIGIDVECTOR(mat_rigid2, d_match_base_rst(1), d_match_base_rst(2), d_match_base_rst(3),TABLE(4),TABLE(5), d_match_rst(3))
ZV_MRCORRECT (mr_p, mat_rigid2, mr_p) 'Correction of point measuring device
ZV_MRCORRECT (mr_l, mat_rigid2, mr_l) 'Correction of line measuring device
ZV_MRCORRECT (mr_c, mat_rigid2, mr_c) 'Correction of circular measuring instrument
endif
Point_measure() 'Measuring point
btn_ml_test() 'Measuring line
btn_mc_test() 'Measuring circle
ZV_GRAYTORGB(grabImg, latch)
ZV_MARKER(latch, draw_point(0), draw_point(1), 0, 20, C_BLUE)
ZV_LINE(latch,draw_line(0),draw_line(1),draw_line(2),draw_line(3),C_BLUE)
ZV_CIRCLE(latch, draw_circle(0),draw_circle(1),draw_circle(2), C_BLUE)
ZV_LATCH(latch,0)
END SUB
19. Add the function that responds when the [run] button is pressed in the operation interface, and associate the action function name.
'Function to respond when the run button is pressed on the run interface
GLOBAL SUB btn_run()
if (1 = main_task_state) then
if (0 = PROC_STATUS(main_task_id)) then
main_task_state = 2
RUNTASK main_task_id, main_task
endif
endif
END SUB
'Functions executed by the main task
main_task:
while(1)
if (3 = main_task_state) then
main_task_state = 1
exit while
endif
'Continuously collect and operate the image
btn_grab()
btn_test()
wend
END
20. Add the function that responds when the [stop] button is pressed in the operation interface, and associate the action function name.
'Function to respond when the stop button is pressed on the operation interface
GLOBAL SUB btn_stop()
if (2 = main_task_state) then
main_task_state = 3
endif
END SUB

02 simulation effect

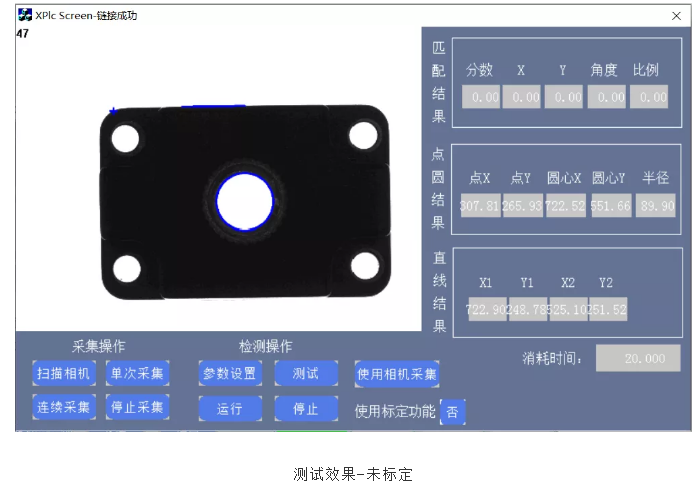
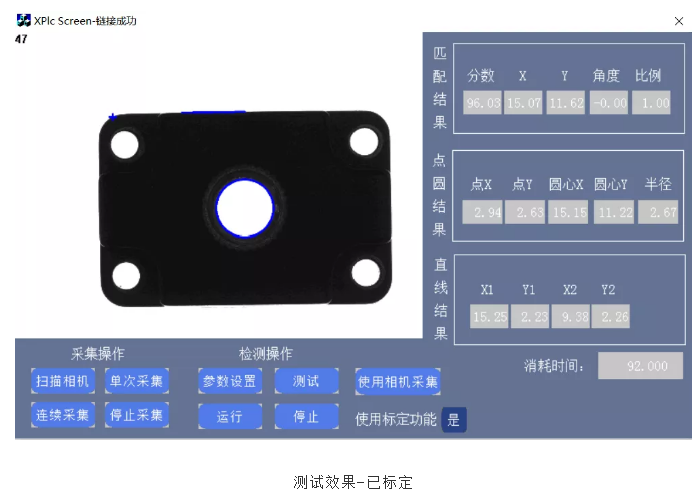
This is the rapid movement of VPLC machine vision motion control machine (eight) - the measuring point / line / circle, which is shared here. More interesting content is concerned about the official account of "the little assistant for movement".
This article is original by positive motion technology. You are welcome to reprint it and learn together to improve China's intelligent manufacturing level. The copyright of this article belongs to rightmovement technology. If you reprint it, please indicate the source of the article.