If the point cloud file is large, you can use the octomap library to compress the point cloud.
octomap organizes point clouds with octree structure, which is a lossy compression. Different resolution can save different scale data.
Here rabbit.pcd For example, the file saves the point cloud in text format (. txt), binary format (. bin), octree format (. ot), octree binary mode (. bt), and compares the sizes of the files saved in different formats.
pcl and octomap need to be installed to run the program. The example is as follows:
#include <iostream> #include <vector> #include <pcl/io/pcd_io.h> #include <pcl/point_types.h> #include <octomap/octomap.h> #include <octomap/OcTree.h> using namespace std; class PointCloudInfo { public: typedef boost::shared_ptr<PointCloudInfo> Ptr; /*!< Point cloud information shared point */ typedef boost::shared_ptr<const PointCloudInfo> ConstPtr; /*!< Point cloud information shared point (const)*/ pcl::PointCloud<pcl::PointXYZ>::Ptr cloud; /*!< Pcl point cloud */ double octo_min_x{ 0 }; /*!< Minimum x-axis value of octomap */ double octo_min_y{ 0 }; /*!< Minimum y-axis value of octomap */ double octo_min_z{ 0 }; /*!< Minimum z-axis value of octomap */ double octo_max_x{ 0 }; /*!< Maximum x-axis value of octomap */ double octo_max_y{ 0 }; /*!< Maximum y-axis value of octomap */ double octo_max_z{ 0 }; /*!< Maximum z-axis value of octomap */ double octo_resol{ 0 }; /*!< Octomap Resolution */ }; struct xyz { float x; float y; float z; }; int main() { pcl::PointCloud<pcl::PointXYZ> cloud; pcl::io::loadPCDFile<pcl::PointXYZ> ( "rabbit.pcd", cloud ); octomap::OcTree tree( 0.001 ); vector<xyz> vp; xyz m_p; FILE *fp = fopen("rabbit.txt","w"); for (auto p:cloud.points) { m_p.x = p.x; m_p.y = p.y; m_p.z = p.z; vp.emplace_back(m_p); tree.updateNode( octomap::point3d(p.x, p.y, p.z), true ); fprintf(fp,"%f %f %f\n",p.x,p.y,p.z); } fclose(fp); fp = fopen("rabbit.bin","wb"); fwrite(&vp[0],vp.size()*sizeof(xyz),1,fp); fclose(fp); tree.updateInnerOccupancy(); tree.write("rabbit.ot"); tree.writeBinary("rabbit.bt"); ///////////////////////////read bt/////////////////////////////////////// octomap::OcTree octo_tree(0.001); octo_tree.readBinary("rabbit.bt"); PointCloudInfo::Ptr pc_info(new PointCloudInfo()); octo_tree.getMetricMin(pc_info->octo_min_x, pc_info->octo_min_y, pc_info->octo_min_z); octo_tree.getMetricMax(pc_info->octo_max_x, pc_info->octo_max_y, pc_info->octo_max_z); pc_info->octo_resol = octo_tree.getResolution(); pc_info->cloud.reset(new pcl::PointCloud<pcl::PointXYZ>()); pcl::PointXYZ point; for (octomap::OcTree::leaf_iterator it = octo_tree.begin_leafs(); it != octo_tree.end_leafs(); ++it) { if (it != nullptr && octo_tree.isNodeOccupied(*it)) { point.x = static_cast<float>(it.getX()); point.y = static_cast<float>(it.getY()); point.z = static_cast<float>(it.getZ()); pc_info->cloud->push_back(point); } } return 0; }
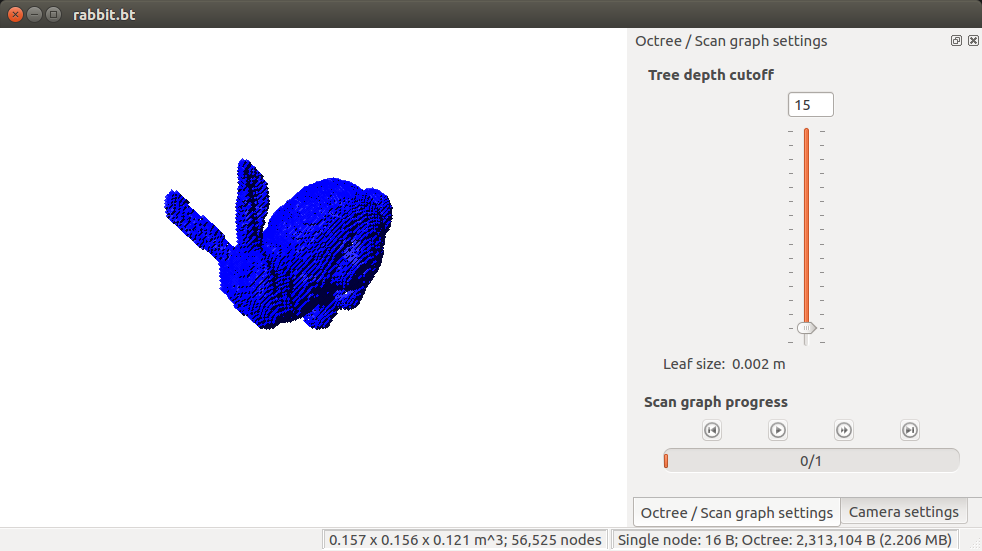
The saved ot or BT file can be viewed with octovis, and input octovis rabbit.bt.
The following table shows the sizes of different files:
| rabbit.pcd | 1.2M |
| rabbit.txt | 1.0M |
| rabbit.bin | 431.4K |
| rabbit.ot | 282.8K |
| rabbit.bt | 44.2K |
It can be seen that the compression rate of bt file is still very high. Although it is lossy compression, it is enough in many cases.