Synchronized FIFO design and IP level verification
I. Preface
FIFO is the most common and basic topic when applying for IC front-end related positions. FIFO is often used for data caching, bit width conversion, asynchronous clock domain processing. With the rapid growth of chip size, flexible system verilog has become the basic skill of designers and validators. Starting with the simplified version of synchronous FIFO, this article is familiar with the basic skills of IP design and verification.
II. IP Design
FIFO, an IP core, is quite mature, so there are a lot of information on the Internet. The author believes that a better one in the appendix at the end of the article, need to understand the working principle of FIFO friends can take a closer look. Here is a brief introduction of the principle and structure of FIFO designed in this paper. The internal storage unit of FIFO is a common dual-port RAM. The essence of this IP is the external shielding and automatic management of read and write addresses. Avoiding full writing and empty reading is crucial. The two modules of FIFO top-level instantiated dual-port RAM and FIFO control are designed in this paper: the former is only used as memory unit to respond to read and write signals, while the latter generates read and write pointers and important empty and full indication signals according to read and write counters.
The code is as follows:
Storage module:


1 `timescale 1ns/1ps
2 module dpram
3 #(parameter D_W=8,
4 A_W=8)
5 (
6 input clk,
7 input rst_n,
8 //write ports
9 input wr_en,
10 input [D_W-1:0] wr_data,
11 input [A_W-1:0] wr_addr,
12 //read ports
13 input rd_en,
14 input [A_W-1:0] rd_addr,
15 output reg [D_W-1:0] rd_data
16 );
17 //RAM
18 reg [D_W-1:0] memory [0:2**A_W-1];
19
20 //write operation
21 always@(posedge clk)begin
22 if(wr_en)begin
23 memory[wr_addr] <= wr_data;
24 end
25 end
26
27 //read operation
28 always@(posedge clk or negedge rst_n)begin
29 if(~rst_n)
30 rd_data <= 0;
31 else if(rd_en)begin
32 rd_data <= memory[rd_addr];
33 end
34 else if(rd_addr == 1)
35 rd_data <= memory[0];
36 end
37
38 endmodule
dpram
FIFO control module:
1 `timescale 1ns/1ps
2 module fifo_ctrl
3 #(parameter A_W = 8,
4 parameter [0:0] MODE = 0//0- standard read 1- first word fall through
5 )
6 (
7 input clk,
8 input rst_n,
9
10 output [A_W-1:0] wr_addr,
11 output [A_W-1:0] rd_addr,
12
13 output empty,
14 output full,
15 input wr_en,
16 input rd_en
17 );
18 localparam MAX_CNT = 2**A_W;
19 localparam FD_W = A_W;
20
21 function [FD_W-1:0] abs;
22 input signed [FD_W-1:0] data;
23 begin
24 assign abs = data >= 0 ? data : -data;
25 end
26 endfunction
27
28 reg [A_W-1:0] wr_cnt;
29 wire add_wr_cnt,end_wr_cnt;
30 reg wr_flag;
31 reg [A_W-1:0] rd_cnt;
32 wire add_rd_cnt,end_rd_cnt;
33 reg rd_flag;
34 wire [A_W+1-1:0] wr_ptr,rd_ptr;
35
36 always@(posedge clk or negedge rst_n)begin
37 if(~rst_n)begin
38 wr_cnt <= 0;
39 end
40 else if(add_wr_cnt)begin
41 if(end_wr_cnt)
42 wr_cnt <= 0;
43 else
44 wr_cnt <= wr_cnt + 1'b1;
45 end
46 end
47
48 assign add_wr_cnt = wr_en & ~full;
49 assign end_wr_cnt = add_wr_cnt && wr_cnt == MAX_CNT - 1;
50
51 always@(posedge clk or negedge rst_n)begin
52 if(~rst_n)begin
53 wr_flag <= 0;
54 end
55 else if(end_wr_cnt)begin
56 wr_flag <= ~wr_flag;
57 end
58 end
59
60 always@(posedge clk or negedge rst_n)begin
61 if(~rst_n)begin
62 rd_cnt <= 0;
63 end
64 else if(add_rd_cnt)begin
65 if(end_rd_cnt)
66 rd_cnt <= 0;
67 else
68 rd_cnt <= rd_cnt + 1'b1;
69 end
70 end
71
72 assign add_rd_cnt = rd_en & ~empty;
73 assign end_rd_cnt = add_rd_cnt && rd_cnt == MAX_CNT - 1;
74
75 always@(posedge clk or negedge rst_n)begin
76 if(~rst_n)begin
77 rd_flag <= 0;
78 end
79 else if(end_rd_cnt)begin
80 rd_flag <= ~rd_flag;
81 end
82 end
83
84 assign wr_ptr = {wr_flag,wr_cnt};
85 assign rd_ptr = {rd_flag,rd_cnt};
86
87 assign wr_addr = wr_cnt;
88 assign rd_addr = rd_cnt + MODE;
89
90 assign empty = wr_ptr == rd_ptr;
91 assign full = (abs(wr_ptr[A_W-1:0] - rd_ptr[A_W-1:0]) < 1) && (wr_ptr[A_W] != rd_ptr[A_W]);
92
93 endmodule
fifo_ctrl
Synchronized FIFO Top Layer:
1 `timescale 1ns/1ps
2 module fifo_sync
3 #(parameter D_W = 8,
4 LOG_2_DEPTH = 8,//2^8 = 256
5 parameter [0:0] MODE = 0
6 )
7 (
8 input clk,
9 input rst_n,
10
11 input wr_en,
12 input [D_W-1:0] wr_data,
13 input rd_en,
14 output [D_W-1:0] rd_data,
15 output wr_full,
16 output rd_empty
17 );
18 wire [LOG_2_DEPTH-1:0] wr_addr,rd_addr;
19
20 dpram #(.D_W(D_W),
21 .A_W(LOG_2_DEPTH))
22 dpram
23 (
24 .clk (clk),
25 .rst_n (rst_n),
26 .wr_en (wr_en),
27 .wr_data (wr_data),
28 .wr_addr (wr_addr),
29 .rd_en (rd_en),
30 .rd_addr (rd_addr),
31 .rd_data (rd_data)
32 );
33
34 fifo_ctrl #(.A_W(LOG_2_DEPTH),
35 .MODE(MODE))
36 fifo_ctrl
37 (
38 .clk (clk),
39 .rst_n (rst_n),
40 .wr_addr (wr_addr),
41 .rd_addr (rd_addr),
42 .empty (rd_empty),
43 .full (wr_full),
44 .wr_en (wr_en),
45 .rd_en (rd_en)
46 );
47
48 endmodule
fifo_sync
In previous projects using FPGA, FIFO IP provided by the manufacturer often provides the "first word drop" mode, so this mode is also provided in this design, that is, the first written data is sent out before the read signal is valid. In addition, in order to improve the universality of the code, we try to use the parameter instead of the fixed value as the signal bit width in the design.
Third, SV builds testbench
Generally speaking, using verilog non-synthetic subset can also write testbench to verify the correctness of the design, but when DUT is more complex, it is not flexible enough. Synchronous FIFO is also designed to learn some skills of writing testbench with system verilog.
Firstly, the verification scheme is clear. Synchronized FIFO is nothing more than a read-write operation, as long as the data written can be read out every time, it is considered that the design is correct. We can read and write at any length and at any interval through the constrained random property of SV. It is difficult to compare data one by one when there are more data. Tesbench should also have a mechanism for automatically comparing data and counting errors.
Using OOP idea, three classes of descriptor transcation scorebord are designed, so it is an accessor that generates random read and write operations, and automatically compares the read and write data scoreboard according to the read and write operations of the accessor information. SV grammar is very flexible, each class can not only include function, but also support task, which brings convenience to sequential operation. It is also important to choose the right data type. Because the length of the data to be written is not fixed, it is appropriate to use dynamic arrays. The increasing reading data information, placed in the queue will be more efficient. Whether FIFO chooses "acronym drop" mode or not has a direct impact on the timing of reading operation. In testbench, macro definition is used to compile condition parameters and read acquisition logic.
The code is as follows:
1 `timescale 1ns/1ps
2 `define VERDI
3 //`define FW
4
5 module testbench();
6
7 parameter CYC = 20,
8 RST_TIM = 2;
9 parameter D_W = 8,
10 LOG_2_DEPTH = 8;
11
12 `ifdef FW
13 parameter [0:0] MODE = 1'b1;//1'b1 1'b0
14 `else
15 parameter [0:0] MODE = 1'b0;
16 `endif
17 parameter MAX_LEN = 2**LOG_2_DEPTH;
18
19 typedef int unsigned uint32;
20 typedef enum {true,false} status_e;
21
22 bit clk,rst_n;
23 bit wr_en;
24 bit [D_W-1:0] wr_data;
25 bit rd_en;
26 logic [D_W-1:0] rd_data;
27 logic wr_full;
28 logic rd_empty;
29 reg rd_en_t;
30
31 `ifdef VERDI
32 initial begin
33 $fsdbDumpfile("wave.fsdb");
34 $fsdbDumpvars("+all");
35 end
36 `endif
37
38 initial begin
39 clk = 1;
40 forever #(CYC/2.0) clk= ~clk;
41 end
42
43 initial begin
44 rst_n = 1;
45 #1;
46 rst_n = 0;
47 #(RST_TIM*CYC) rst_n = 1;
48 end
49
50 class Descriptor;
51 rand bit [16-1:0] len_w,len_r,interval;
52
53 constraint c {
54 len_w inside {[1:20]};
55 len_r inside {[0:20]};
56 interval inside {[2:6]};
57 }
58 function new;
59 $display("Created a object");
60 endfunction
61 endclass:Descriptor
62
63 class Transcation;
64 bit [D_W-1:0] data_packet[];
65 static uint32 q_len[$];
66 static uint32 q_rd_data[$];
67 uint32 q_ref_data[$];
68
69 Descriptor dp;
70
71 function new();
72 dp = new();
73 assert(dp.randomize());
74 q_len.push_back(dp.len_w);
75 endfunction
76
77 extern task wri_oper;
78 extern task rd_oper;
79 extern task wr_rd_operation;
80 extern function void ref_gen(ref uint32 q_ref_data[$]);
81
82 endclass:Transcation
83
84 task Transcation::wri_oper;
85 uint32 wr_num;
86 $display("Write:%d",$size(tr.data_packet));
87 @(posedge clk);
88 #1;
89 while(wr_num < dp.len_w)begin
90 if(~wr_full)begin
91 wr_en = 1;
92 wr_data = tr.data_packet[wr_num];
93 wr_num++;
94 end
95 else begin
96 wr_en = 0;
97 wr_data = tr.data_packet[wr_num];
98 end
99 #(CYC*1);
100 end
101 wr_en = 0;
102 endtask
103
104 task Transcation::rd_oper;
105 uint32 rd_num;
106 $display("Read: %d",dp.len_r);
107 @(posedge clk);
108 #1;
109 #(dp.interval*CYC);
110 while(rd_num < dp.len_r)begin
111 if(~rd_empty)begin
112 rd_en = 1;
113 rd_num++;
114 end
115 else
116 rd_en = 0;
117 #(CYC*1);
118 end
119 rd_en = 0;
120 endtask
121
122 task Transcation::wr_rd_operation;
123 tr.data_packet = new[dp.len_w];
124 $display("len_w = %d, len_r = %d, inverval = %d",dp.len_w,dp.len_r,dp.interval);
125 foreach(tr.data_packet[i])begin
126 tr.data_packet[i] = i+1;
127 //$display(tr.data_packet[i]);
128 end
129 fork
130 wri_oper;
131 rd_oper;
132 join
133 endtask
134
135 function void Transcation::ref_gen(ref uint32 q_ref_data[$]);
136 integer j;
137 foreach(q_len[i])begin
138 for(j=0;j<q_len[i];j++)begin
139 q_ref_data = {q_ref_data,j+1};
140 end
141 end
142 endfunction
143
144 class Scoreboard;
145 uint32 total_num,error_num = 0;
146
147 function compare(ref uint32 q_data[$],ref uint32 q_ref[$]);
148 uint32 comp_num;
149 uint32 i;
150 uint32 data_len,ref_len;
151 status_e status;
152 data_len = $size(q_data);
153 ref_len = $size(q_ref);
154 $display("The lengths of q_data and q_ref are %d,%d",$size(q_data),$size(q_ref));
155 if(data_len >= ref_len)
156 comp_num = ref_len;
157 else
158 comp_num = data_len;
159 total_num = comp_num;
160 for(i=0;i<comp_num;i++)begin
161 if(q_data[i] != q_ref[i])begin
162 error_num++;
163 $display("The %dth data is different between the two!",i);
164 status = false;
165 return status;
166 end
167 end
168 status = true;
169 return status;
170 endfunction
171 endclass
172
173 //Descriptor dp;
174 Transcation tr;
175 Scoreboard sb;
176
177 //main
178 initial begin
179 //int status;
180 status_e status;
181 wr_en = 0;
182 rd_en = 0;
183 wr_data = 0;
184 #1;
185 #(2*CYC);
186 repeat(2)begin
187 tr = new();
188 tr.wr_rd_operation;
189 #(50*CYC);
190 end
191 #20;
192 tr.ref_gen(tr.q_ref_data);
193
194 //soreboard
195 sb = new();
196 status = sb.compare(tr.q_rd_data,tr.q_ref_data);
197 if(status == true)
198 $display("Simulation success!");
199 else
200 $display("Simulation filure!");
201 $stop;
202 end
203
204 //save readed data
205 initial begin
206 forever begin
207 @(posedge clk);
208 `ifdef FW
209 if(rd_en)
210 `else
211 if(rd_en_t)
212 `endif
213 tr.q_rd_data = {tr.q_rd_data,rd_data};
214 end
215 end
216
217 always@(posedge clk)begin
218 rd_en_t <= rd_en;
219 end
220
221 fifo_sync
222 #(.D_W(D_W),
223 .LOG_2_DEPTH(8),//256
224 .MODE(MODE)
225 )uut
226 (
227 .clk (clk),
228 .rst_n (rst_n),
229 .wr_en (wr_en),
230 .wr_data (wr_data),
231 .rd_en (rd_en),
232 .rd_data (rd_data),
233 .wr_full (wr_full),
234 .rd_empty (rd_empty)
235 );
236
237 endmodule:testbench
testbench.sv
IV. Use of VCS+Verdi Tools
It has to be said that most EDA tools are not as friendly as the development tools in IT industry, and it takes a lot of effort to use them. VCS has its own GUI debug tool, but it is not powerful enough. Here we use Verdi to debug. In the SV code in the previous section, there is a section of fsdb code that is specifically designed to generate Verdi waveform files. Since SV itself does not have these two system function s, it is necessary to specify two library file paths when using SV. The author directly defines an alias: (bash shell) for lengthy commands and options.
alias vcs_verdi="vcs -full64 -sverilog -debug_all -P ${NOVAS_HOME}/share/PLI/VCS/linux64/novas.tab ${NOVAS_HOME}/share/PLI/VCS/linux64/pli.a +define+DUMPFSDB"
.bashrc file:

This path name seems to have to be NOVAS_HOME, otherwise it will make an error, which is also a pit. The first step of code compilation is accomplished by using the above instructions, followed by the execution of the simulation program and the invocation of the Verdi GUI interface to observe the waveform. The order is:
./simv
verdi -sv -f filename -ssf wave.fsdb
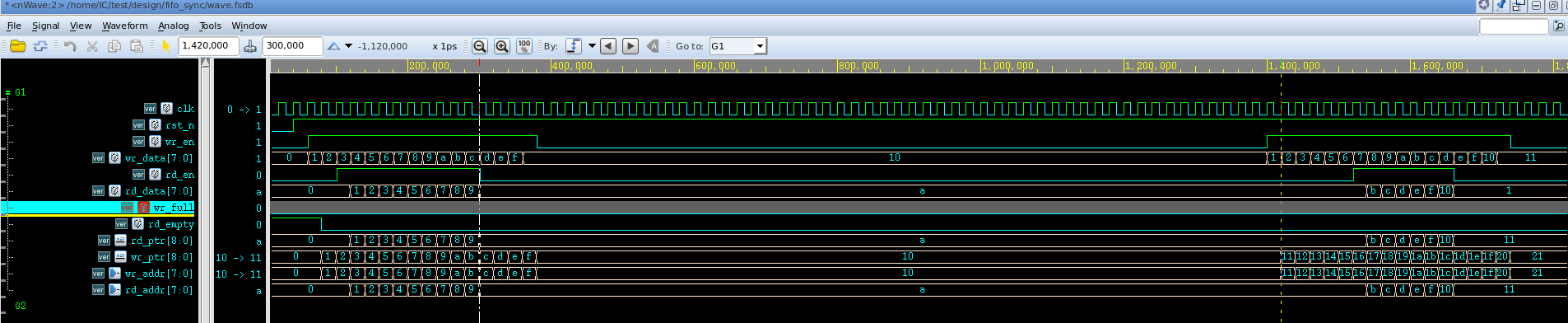
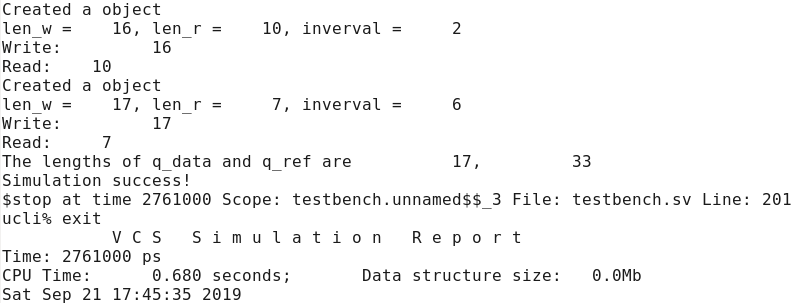
The waveform file specified in testbench will be generated after simulation. The verdi interface is opened after the third step command is executed.
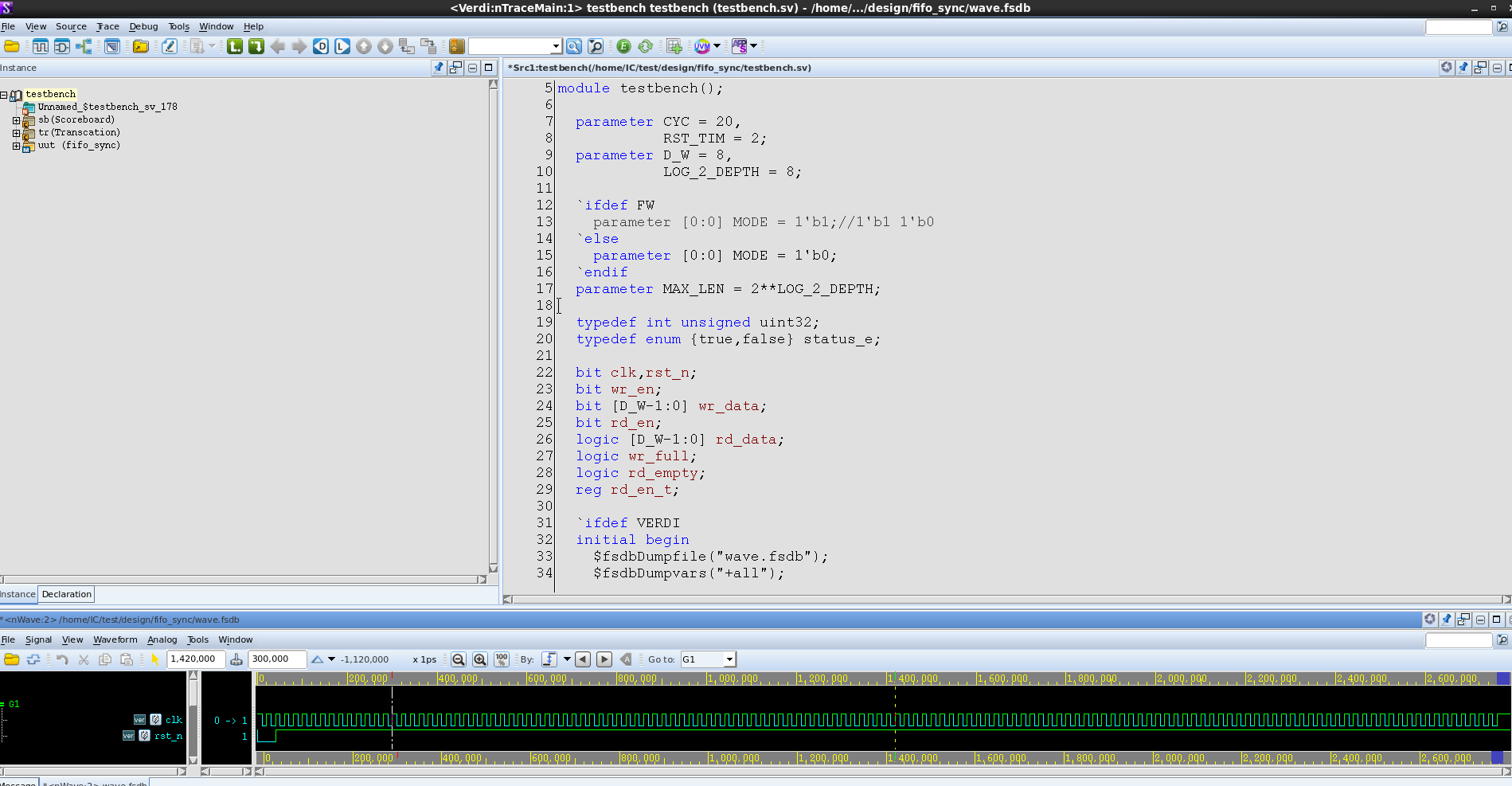
Through waveform and Log after simulation, we can see that the simulation is passed, and there are no errors in reading and writing FIFO.
Here are some basic techniques for using verdi.
Observe the specified signal waveform: Select the variable in the code and add it to the waveform window by ctrl+w.
Save the waveform configuration file: In the waveform interface, press shift+s to save the. rc file.
Retrieve the stored configuration file: click r, select the stored. rc file and open it.
For the first time, the author uses OOP idea to build testbench with SV, and also uses VCS+Verdi tool chain to simulate and debug. Despite the simplicity of design validation, it still stuck many times. Asynchronous FIFO design and reusable testbench based on UVM will be tried later.
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
appendix
1 [Image and Text] Synchronized FIFO-Baidu Library https://wenku.baidu.com/view/620e3934a32d7375a4178037.html
2. EDA under linux - VCS and Verdi simulation - blog of moon9999 - CSDN blog https://blog.csdn.net/moon9999/article/details/76615869
Keywords:
Verilog
shell
Linux
Added by ianhull on Sat, 21 Sep 2019 15:43:49 +0300