1, Digital image processing
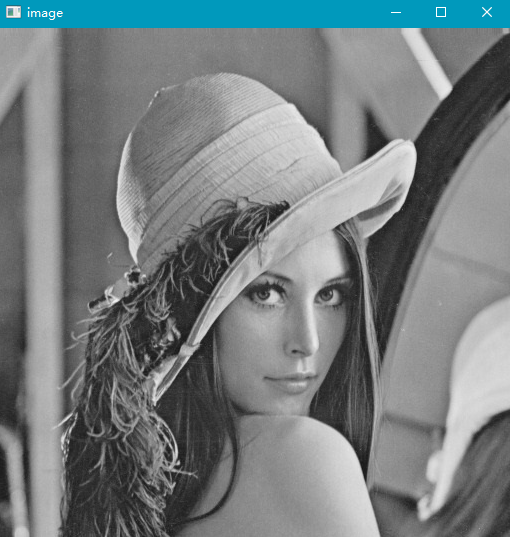
1.1 converting color image files to grayscale files
- gray image Gray image is an image with only one sampling color per pixel. This kind of image is usually displayed as a gray scale from the darkest black to the brightest white. In theory, this sampling can be different in the depth of any color, or even different colors in different brightness. gray image is different from black-and-white image. In the field of computer image, black-and-white image has only black and white Two colors; However, grayscale images have many levels of color depth between black and white. Gray level images are often obtained by measuring the brightness of each pixel in a single electromagnetic wave spectrum such as visible light. The gray level images used for display are usually saved with a nonlinear scale of 8 bits per sampling pixel, so that there can be 256 gray levels (65536 if 16 bits are used).
Using Opencv
import cv2 as cv
image = cv.imread('lena.png')
gray_image = cv.cvtColor(image, code=cv.COLOR_BGR2GRAY)
# display picture
cv.imshow('image', gray_image)
cv.waitKey(0)
cv.destroyAllWindows()
Do not use Opencv
rom PIL import Image
Img = Image.open('lena.png')
Img.show()
Le = Img.convert('L')
Le.show()
1.2 convert color images (RGB) to HSV and HSI formats
Introduction to image format
1. RGB model
3D coordinates:
The central axis from the origin to the white vertex is a gray line. The three components r, g and b are equal, and the intensity can be expressed by the vector of the three components.
Use RGB to understand the changes of color, depth and light and shade:
Color change: the connecting line between the RGB maximum component vertex of the three coordinate axes and the yellow purple green YMC color vertex
Depth variation: the distance from RGB and CMY vertices to the central axis of the origin and white vertices
Light and shade change: the position of the point of the central axis is darker at the origin and brighter at the white vertex.
2. HSV model
Inverted cone model:
This model is described by color, depth and light and shade.
H is color
S is the depth, and when S = 0, there is only gray scale
V is light and shade, indicating the brightness of the color, but it has no direct relationship with the light intensity.
3.HSI model
Hue: refers to the color attribute of a solid color (hue is related to wavelength, which is people's perception of different colors);
Saturation: a measure of the degree to which a solid color is diluted by white light (the greater the saturation, the brighter the color);
Intensity: it is a subjective factor, which is actually immeasurable (brightness and image gray are the brightness of color).
Generally speaking, H = hue; Decide what color it is, S = saturation (purity); decide the color intensity, B = brightness (brightness); decide how bright the white light shines on the color. This explanation is a real answer I've seen to understand what HSI is.
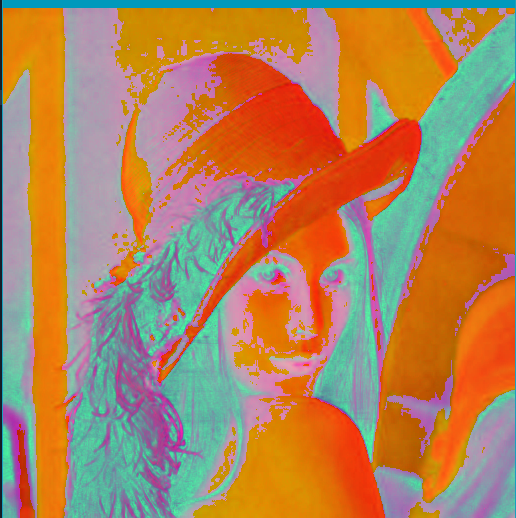
- To HSV
mport cv2 as cv
image = cv.imread('Lena.png')
hsv = cv.cvtColor(image, cv.COLOR_BGR2HSV)
# display picture
cv.imshow('hsv',hsv)
# Wait for keyboard input
cv.waitKey(0)
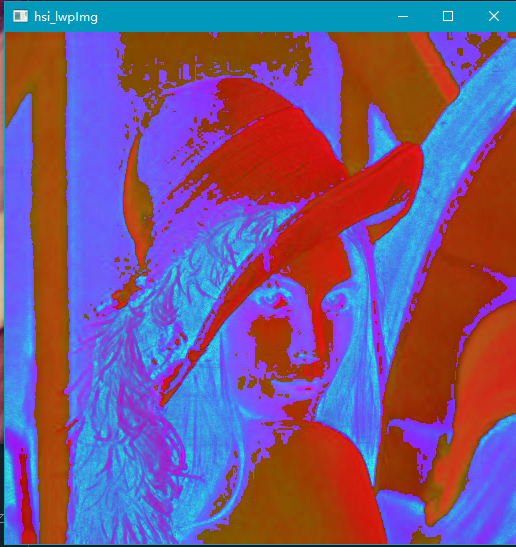
- Transfer to HSI
import cv2
import numpy as np
def rgbtohsi(rgb_lwpImg):
rows = int(rgb_lwpImg.shape[0])
cols = int(rgb_lwpImg.shape[1])
b, g, r = cv2.split(rgb_lwpImg)
# Normalized to [0,1]
b = b / 255.0
g = g / 255.0
r = r / 255.0
hsi_lwpImg = rgb_lwpImg.copy()
H, S, I = cv2.split(hsi_lwpImg)
for i in range(rows):
for j in range(cols):
num = 0.5 * ((r[i, j]-g[i, j])+(r[i, j]-b[i, j]))
den = np.sqrt((r[i, j]-g[i, j])**2+(r[i, j]-b[i, j])*(g[i, j]-b[i, j]))
theta = float(np.arccos(num/den))
if den == 0:
H = 0
elif b[i, j] <= g[i, j]:
H = theta
else:
H = 2*3.14169265 - theta
min_RGB = min(min(b[i, j], g[i, j]), r[i, j])
sum = b[i, j]+g[i, j]+r[i, j]
if sum == 0:
S = 0
else:
S = 1 - 3*min_RGB/sum
H = H/(2*3.14159265)
I = sum/3.0
# The HSI image is output and expanded to 255 to facilitate display. Generally, the H component is between [0,2pi], and the S and I are between [0,1]
hsi_lwpImg[i, j, 0] = H*255
hsi_lwpImg[i, j, 1] = S*255
hsi_lwpImg[i, j, 2] = I*255
return hsi_lwpImg
if __name__ == '__main__':
rgb_lwpImg = cv2.imread("lena.png")
hsi_lwpImg = rgbtohsi(rgb_lwpImg)
cv2.imshow('hsi_lwpImg', hsi_lwpImg)
key = cv2.waitKey(0) & 0xFF
if key == ord('q'):
cv2.destroyAllWindows()
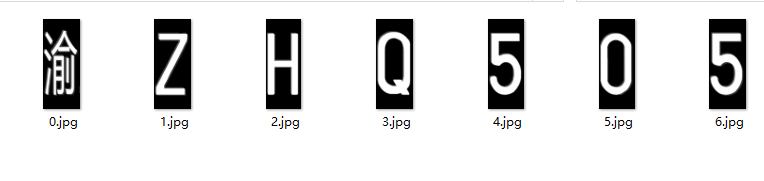
2, Split license plate
Firstly, the license plate number image is grayed out, then the pixel threshold at 5% is calculated, and finally the grayscale image is binarized.
Remove the interference surrounded by white borders around the license plate number, and then segment the characters according to the vertical projection width and accumulated values of the license plate picture.
Using Opencv
- code
import cv2
import numpy as np
import os
def stackImages(scale, imgArray):
"""
Press multiple images into the same window for display
:param scale:float Type, output image display percentage, control zoom scale, 0.5=The image resolution is reduced by half
:param imgArray:Tuple nested list, image matrix to be arranged
:return:Output image
"""
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
# Fill in with empty pictures
for i in range(rows):
tmp = cols - len(imgArray[i])
for j in range(tmp):
img = np.zeros((imgArray[0][0].shape[0], imgArray[0][0].shape[1]), dtype='uint8')
imgArray[i].append(img)
# Judgment dimension
if rows>=2:
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
else:
width = imgArray[0].shape[1]
height = imgArray[0].shape[0]
if rowsAvailable:
for x in range(0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape[:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]),
None, scale, scale)
if len(imgArray[x][y].shape) == 2:
imgArray[x][y] = cv2.cvtColor(imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank] * rows
hor_con = [imageBlank] * rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None, scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor = np.hstack(imgArray)
ver = hor
return ver
# Segmentation result output path
output_dir = "D:\\MyworkSpace\\Spyder\\bmp\\pint\\"
# License plate path
file_path="D:\\MyworkSpace\\Spyder\\bmp\\pin\\"
# Read all license plates
cars = os.listdir(file_path)
cars.sort()
# Cycle each license plate
for car in cars:
# Read picture
print("Processing"+file_path+car)
src = cv2.imread(file_path+car)
img = src.copy()
# Pretreatment to remove screw points
cv2.circle(img, (145, 20), 10, (255, 0, 0), thickness=-1)
cv2.circle(img, (430, 20), 10, (255, 0, 0), thickness=-1)
cv2.circle(img, (145, 170), 10, (255, 0, 0), thickness=-1)
cv2.circle(img, (430, 170), 10, (255, 0, 0), thickness=-1)
cv2.circle(img, (180, 90), 10, (255, 0, 0), thickness=-1)
# Turn gray
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Binarization
adaptive_thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY_INV, 333, 1)
# Closed operation
kernel = np.ones((5, 5), int)
morphologyEx = cv2.morphologyEx(adaptive_thresh, cv2.MORPH_CLOSE, kernel)
# Find boundary
contours, hierarchy = cv2.findContours(morphologyEx, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
# Draw boundary
img_1 = img.copy()
cv2.drawContours(img_1, contours, -1, (0, 0, 0), -1)
imgStack = stackImages(0.7, ([src, img, gray], [adaptive_thresh, morphologyEx, img_1]))
cv2.imshow("imgStack", imgStack)
cv2.waitKey(0)
# Turn gray to facilitate cutting
gray_1 = cv2.cvtColor(img_1, cv2.COLOR_BGR2GRAY)
# Number of white in each column
white = []
# Number of black in each column
black = []
# The area height depends on the image height
height = gray_1.shape[0]
# The area width depends on the width of the picture
width = gray_1.shape[1]
# Maximum white quantity
white_max = 0
# Maximum number of black
black_max = 0
# Calculate the sum of black and white pixels for each column
for i in range(width):
s = 0 # The total number of white in this column
t = 0 # Total number of black in this column
for j in range(height):
if gray_1[j][i] == 255:
s += 1
if gray_1[j][i] == 0:
t += 1
white_max = max(white_max, s)
black_max = max(black_max, t)
white.append(s)
black.append(t)
# Right boundary found
def find_end(start):
end = start + 1
for m in range(start + 1, width - 1):
# Basically all black columns are treated as boundaries
if black[m] >= black_max * 0.95: # Please adjust the parameter of 0.95 more, corresponding to 0.05 below
end = m
break
return end
# Temporary variable
n = 1
# Starting position
start = 1
# End position
end = 2
# Number of segmentation results
num=0
# Segmentation results
res = []
# Save the segmentation result path and name it with the picture name
output_path= output_dir + car.split('.')[0]
if not os.path.exists(output_path):
os.makedirs(output_path)
# Traverse from left to right
while n < width - 2:
n += 1
# Find white to determine the starting address
# You cannot directly white [n] > white_ max
if white[n] > 0.05 * white_max:
start = n
# Find end coordinates
end = find_end(start)
# Start address of next
n = end
# Make sure what you find meets the requirements. It's too small, not the license plate number
if end - start > 10:
# division
char = gray_1[1:height, start - 5:end + 5]
# Save split results to file
cv2.imwrite(output_path+'/' + str(num) + '.jpg',char)
num+=1
# Redraw size
char = cv2.resize(char, (300, 300), interpolation=cv2.INTER_CUBIC)
# Add to result collection
res.append(char)
# cv2.imshow("imgStack", char)
# cv2.waitKey(0)
# The result of the construction is convenient for the display of the result of Yuanzu
res2 = (res[:2], res[2:4], res[4:6], res[6:])
# Display results
imgStack = stackImages(0.5, res2)
cv2.imshow("imgStack", imgStack)
cv2.waitKey(0)
- The image is grayed and binarized


- Segmentation results

summary
- In the use of OpenCV ready-made package, the image processing will be much simpler. After being familiar with the basic principle of OpenCV, it is more convenient to process image processing.