Introduction: ※ apriltag detection is a relatively simple method based on visual positioning. This paper discusses the effect of homography matrix in apriltag detection results, which is inconsistent with the application that can be directly used to draw apriltag normal vector. The ability of apriltag algorithm pasted on non plane is tested. If pasted on the cylinder, the apriltag can still be detected within a certain angle range.
Key words: Apriltag
§ 01 single transformation matrix
in the Apriltag detection result, the Homography parameter is included, which represents the Homography matrix mapping the points located at the four corners of the origin to the four corners of the detected Apriltag.
1.1 two homography matrices
apd = apriltag.Detector(apriltag.DetectorOptions(families='tag25h9'))
for id,imgfile in tqdm(enumerate(filedim)):
img = cv2.imread(imgfile)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
tags = apd.detect(gray)
under the above code detection, two tags can be detected, and their homography matrix is:
homo: [[ 6.68676859e-01 3.40896152e-02 2.82713831e+00] [-2.10627077e-01 7.71189655e-01 1.91688676e+00] [ 8.45537778e-05 7.78231041e-05 5.32189903e-03]] homo: [[-5.21963542e-01 -3.95455759e-02 -1.49500546e+00] [-2.46071422e-01 -8.10661947e-01 -1.95403490e+00] [ 1.26923428e-04 -9.26461141e-05 -5.56235094e-03]]
the positions of the corresponding corrected corners can be obtained by inverse mapping the four corners with the homography matrix:
corner = ones((4,3), float32)
corner[:,:2] = tag.corners
inv_c = linalg.inv(homo).dot(corner.T)
print("inv_c.T:\n{}".format(inv_c.T))
inv_c.T: [[-193.81639822 -193.81639822 193.81639822] [ 187.66550781 -187.66550781 187.66550781] [ 182.3394766 182.3394766 182.3394766 ] [-188.14079484 188.14079484 188.14079485]] inv_c.T: [[ 178.67901064 178.67901064 -178.67901064] [-187.16842875 187.16842875 -187.16842874] [-180.89484096 -180.89484096 -180.89484096] [ 172.9529146 -172.9529146 -172.9529146 ]]
1.2 mapping from origin
if you set the point at (0,0) and different z values, can you obtain the position of the original Apriltag center point by using the inverse mapping of geometry.
inv_c = linalg.inv(homo).dot(corner.T)
print("inv_c.T:\n{}".format(inv_c.T))
for f in arange(0.1, 2, 0.05):
c0 = array([0,0, mean(inv_c.T, axis=0)[-1]*f])
c0_inv = homo.dot(c0)
for c in tag.corners:
cv2.circle(img, tuple(c.astype(int)), 4, (0,0,255),2)
cv2.circle(img, tuple(tag.center.astype(int)), 8, (0, 100, 20), 4)
cv2.circle(img, tuple(c0_inv[:2].astype(int)), 8, (0, 00, 255), 8)
cv2.line(img, tuple(c0_inv[:2].astype(int)), tuple(tag.center.astype(int)), (200, 0,0), 3)
break
giffile = os.path.join(gifpath, '%03d.JPG'%id)
cv2.imwrite(giffile, img)
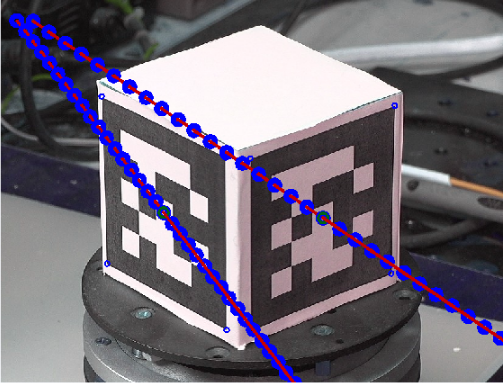
the above mapping shows that we originally wanted to obtain a normal vector perpendicular to the center of the Apriltag, but in fact, we didn't get it. At least the Apriltag on the left does not correspond to such a mapping.
.
§ 02 Apriltag on cylinder
if the Apriltag is no longer on a plane, but on a cylinder, can it be identified?
test below.

2.1 treatment results
2.1.1 processing code
from headm import * # =
import apriltag
import cv2
filename = '/home/aistudio/work/apcol.jpg'
img = cv2.imread(filename)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
atd = apriltag.Detector(apriltag.DetectorOptions(families='tag36h11 tag25h9'))
tags = atd.detect(gray)
printt(tags:)
for tag in tags:
for c in tag.corners:
cv2.circle(img, tuple(c.astype(int)), 8, (255,0,0), 3)
cv2.circle(img, tuple(tag.center.astype(int)), 8, (255,0,0),4)
plt.clf()
plt.figure(figsize=(10,10))
plt.axis("off")
plt.imshow(img)
2.1.2 identification results
tags: [Detection(tag_family=b'tag25h9', tag_id=0, hamming=1, goodness=0.0, decision_margin=83.2973403930664, homography=array([[6.94448482e-01, 4.13404455e-02, 1.53937712e+00],
[3.06866462e-02, 7.49597594e-01, 1.49692939e+00],
[3.48276471e-06, 7.46954292e-05, 3.75277229e-03]]), center=array([410.19731493, 398.88628287]), corners=array([[218.68760681, 195.02702332],
[595.53161621, 211.32849121],
[593.89074707, 594.42523193],
[231.76583862, 579.45843506]]))]

2.2 identification results of different angles
rotate the cylinder pasted with Apriltag for one week. Test the angle at which the Apriltag can be recognized. It can be seen that the algorithm can also detect the Apriltag when there are only a few in the middle.
 ▲ figure 2.2.1 can detect Apriltag
▲ figure 2.2.1 can detect Apriltag
※ general ※ conclusion ※
apriltag detection is a relatively simple method based on visual positioning. This paper discusses the effect of homography matrix in apriltag detection results, which is inconsistent with the application that can be directly used to draw apriltag normal vector. The ability of apriltag algorithm pasted on non plane is tested. If pasted on the cylinder, the apriltag can still be detected within a certain angle range.
● relevant chart links:
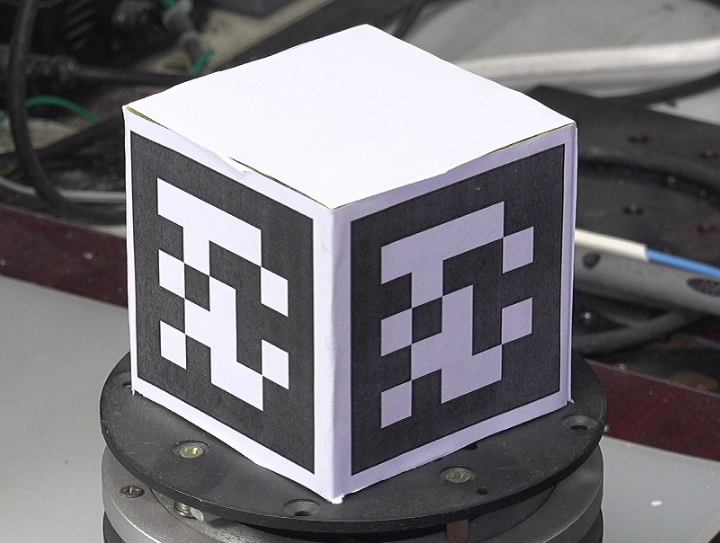
- Figure 1.1 positioning the Apriltag on both sides of the cube at the Apriltag
- Figure 1.2.1 homography conversion from different heights of (0,0) to obtain trajectory
- Figure 2.1 Apriltag attached to a cylinder
- Figure 2.1.1 Apriltag identification results
- Figure 2.1.2 Apriltag with one revolution
- Fig. 2.2.1 the situation where Apriltag can be detected